
アンテナの組立
アンテナを広げ、折りたたみジョイントのラッチを使用してまっすぐにロックします。





電源ケーブルをボックスに接続
赤丸の部分にコネクターを差し込み、半回転させることでロックされます。
電源ケーブルにはバッテリーをつなぎます。


テザーインターフェースとアンテナのケーブルをボックスに接続
ケースの電源ケーブルと逆側にアンテナとテザーインターフェースにつないだケーブルを接続します。
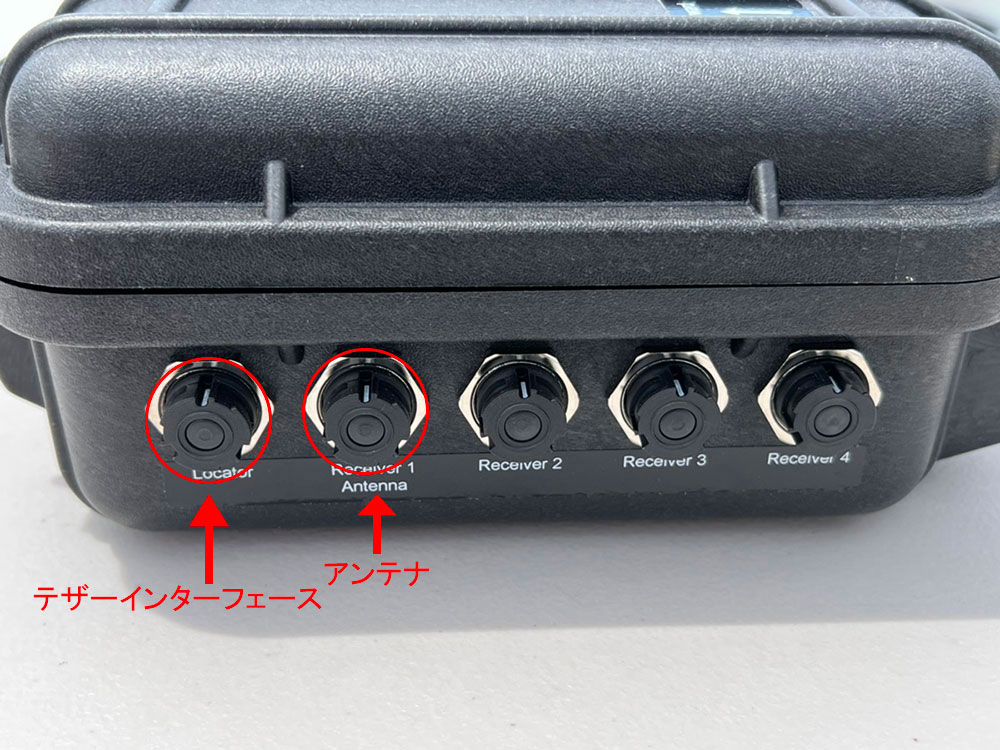

配線の接続はこれで完了です。
設定
運用するパソコンにIPアドレス 192.168.2.94を設定します。BlueROV2を運用する場合は、静的 IP アドレス 192.168.2.1、サブネット マスク 255.255.255.0 に設定されていますのでそこはそのままで結構です。もしこのIPが設定されていないようでしたらこちらを参考にして設定してください。
参考ファイアウォールが QGroundControl とネットワークの通信を許可していることを確認してください。
UGPS トップサイド ユニット内のIP スイッチを192.168.2.94(下の位置)に設定します。これにより、G2 トップサイド ユニットに静的 IP アドレス 192.168.2.94 が割り当てられます。(弊社納品物は設定済みです)
Position
Baseline
Advanced Settingsをクリック。何か設定をしたらその設定の保存としてApplyをクリックします。
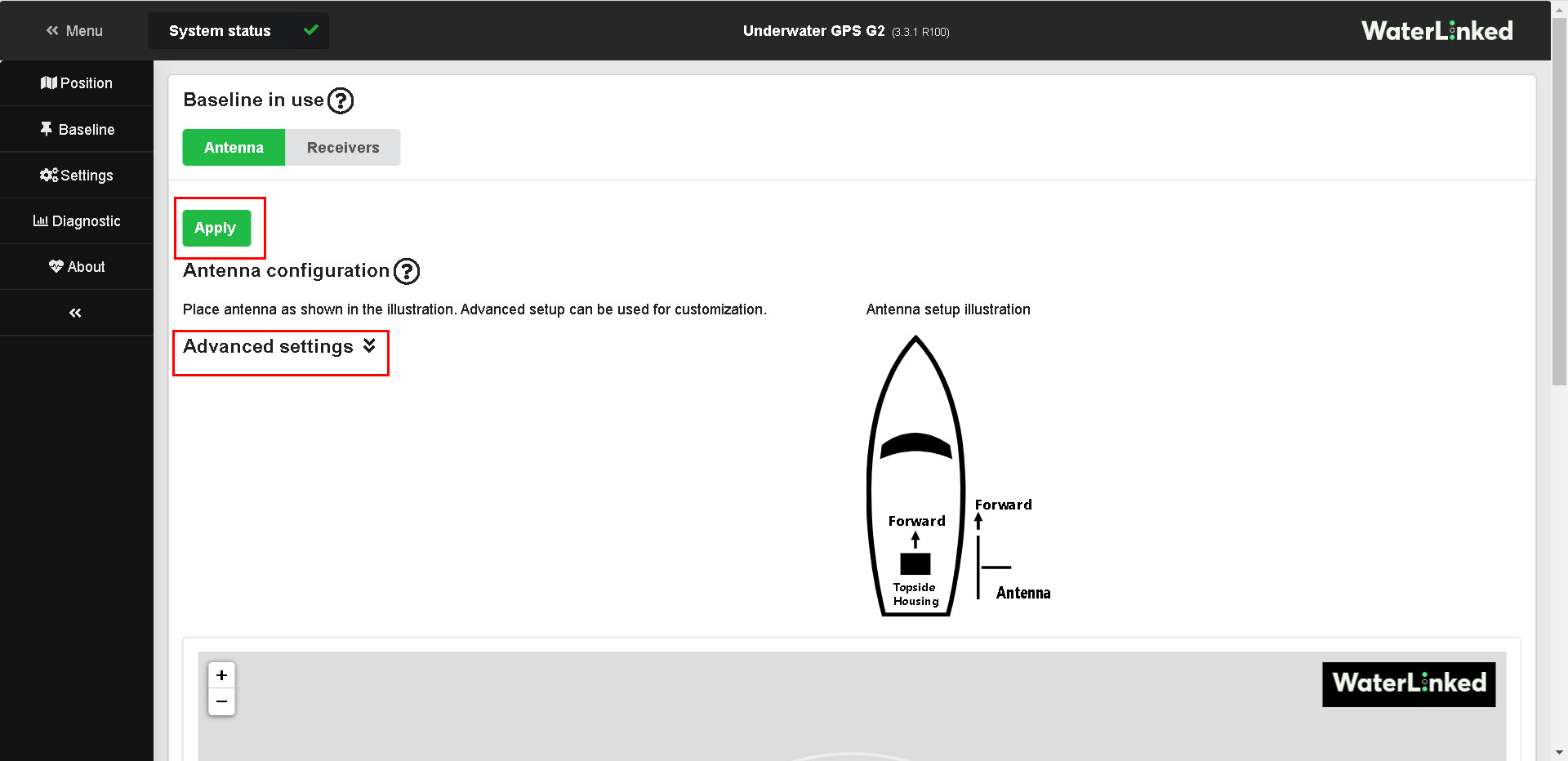
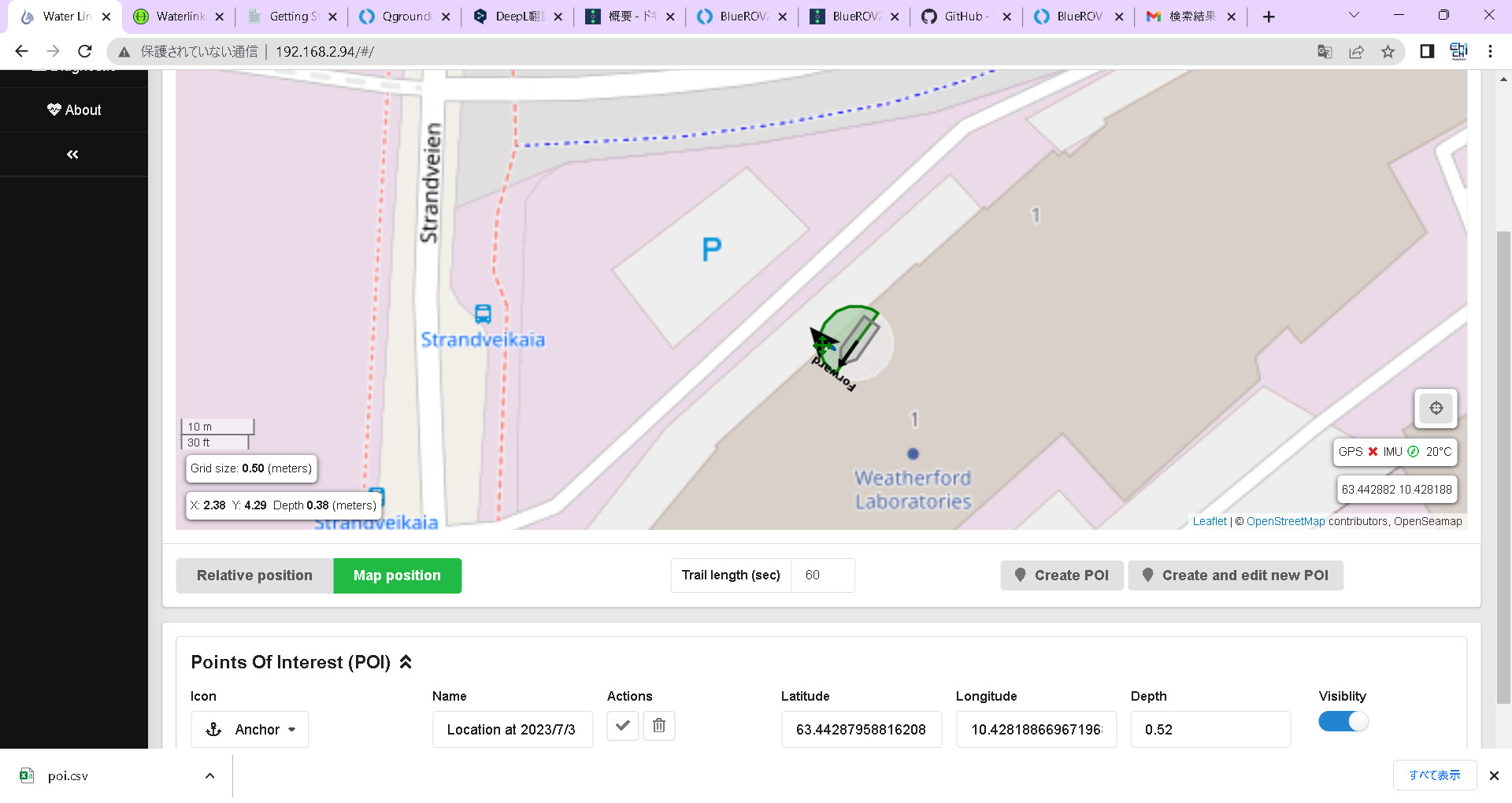
Advanced Settingsをクリックすると下記の画面が表示されます。これはアンテナとペリカンケースのボックスがどの配置にあるか位置を入力します。ペリカンケースに対してアンテナがどこにあるか距離で入力します。
Topsideというのがペリカンケースの事です。
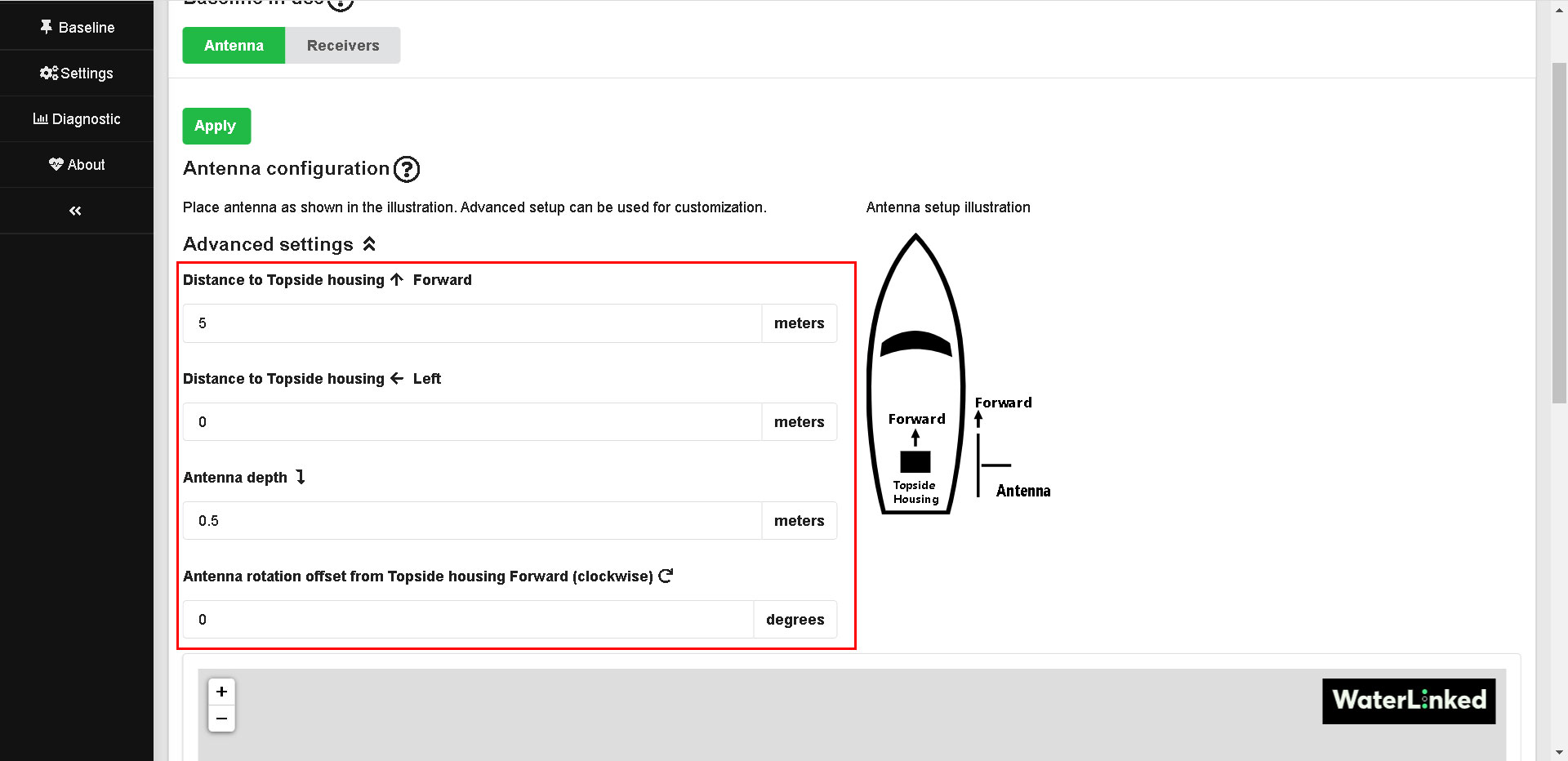
Distance to Topside housing ↑ Forward
アンテナから見て前方↑何メートルの位置にペリカンケースがあるか入力します。
Distance to Topside housing←Left
アンテナから見て左←何メートルの位置にペリカンケースがあるか入力します。
Antenna depht
アンテナがどのくらいの深さにあるか入力します。
Antenna rotation offset from Topside housing Forward(clockwise)
赤枠の右側の図を基準として時計方向に何度の回転位置にあるか入力します。
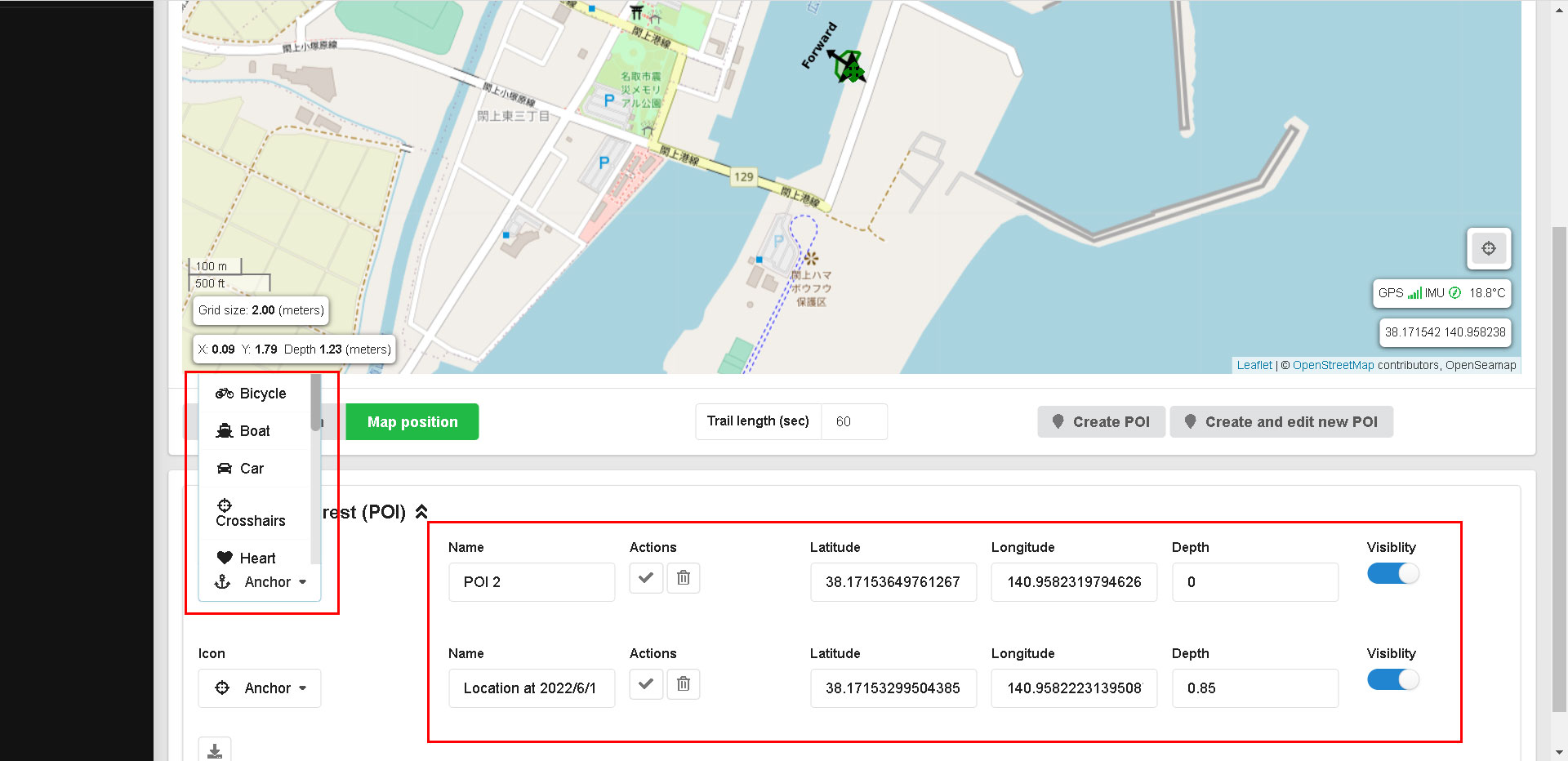
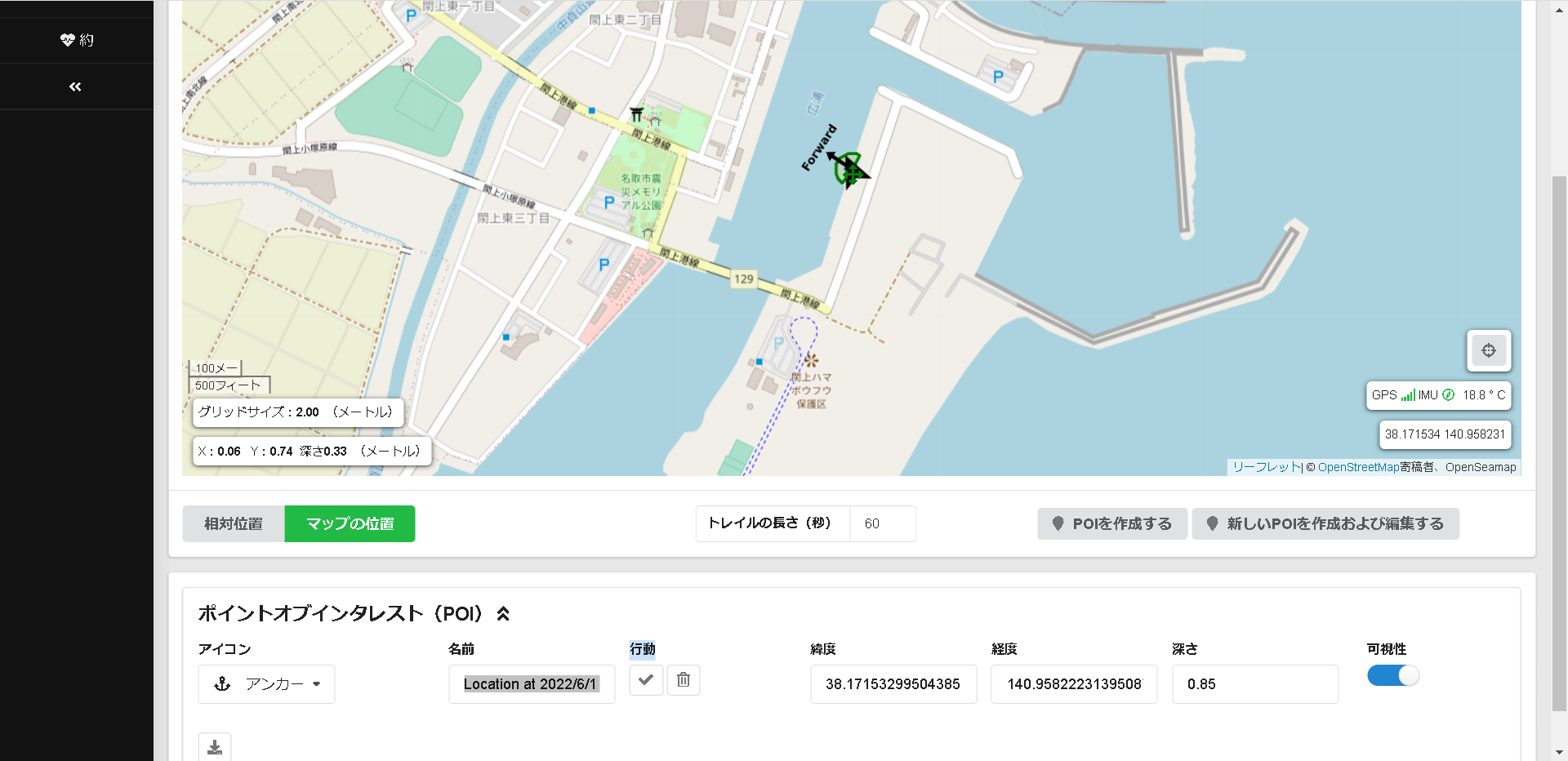
次にGPSを反応させる範囲を設定します。この設定は無駄に広くしないで必要な部分のみの設定にした方が精度が上がります。
赤丸の矢印や回転アイコンなどのクリックし範囲を設定します。
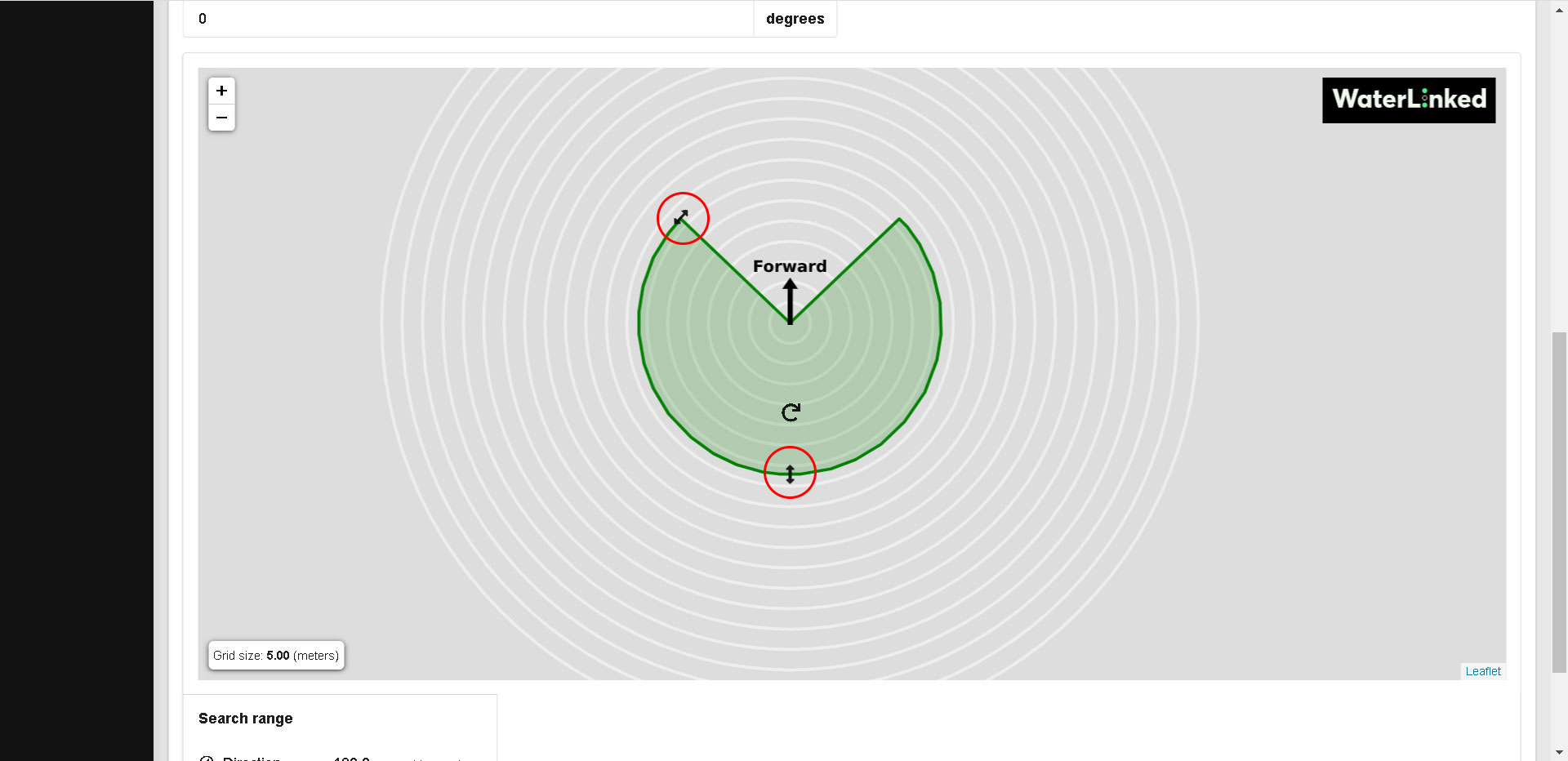
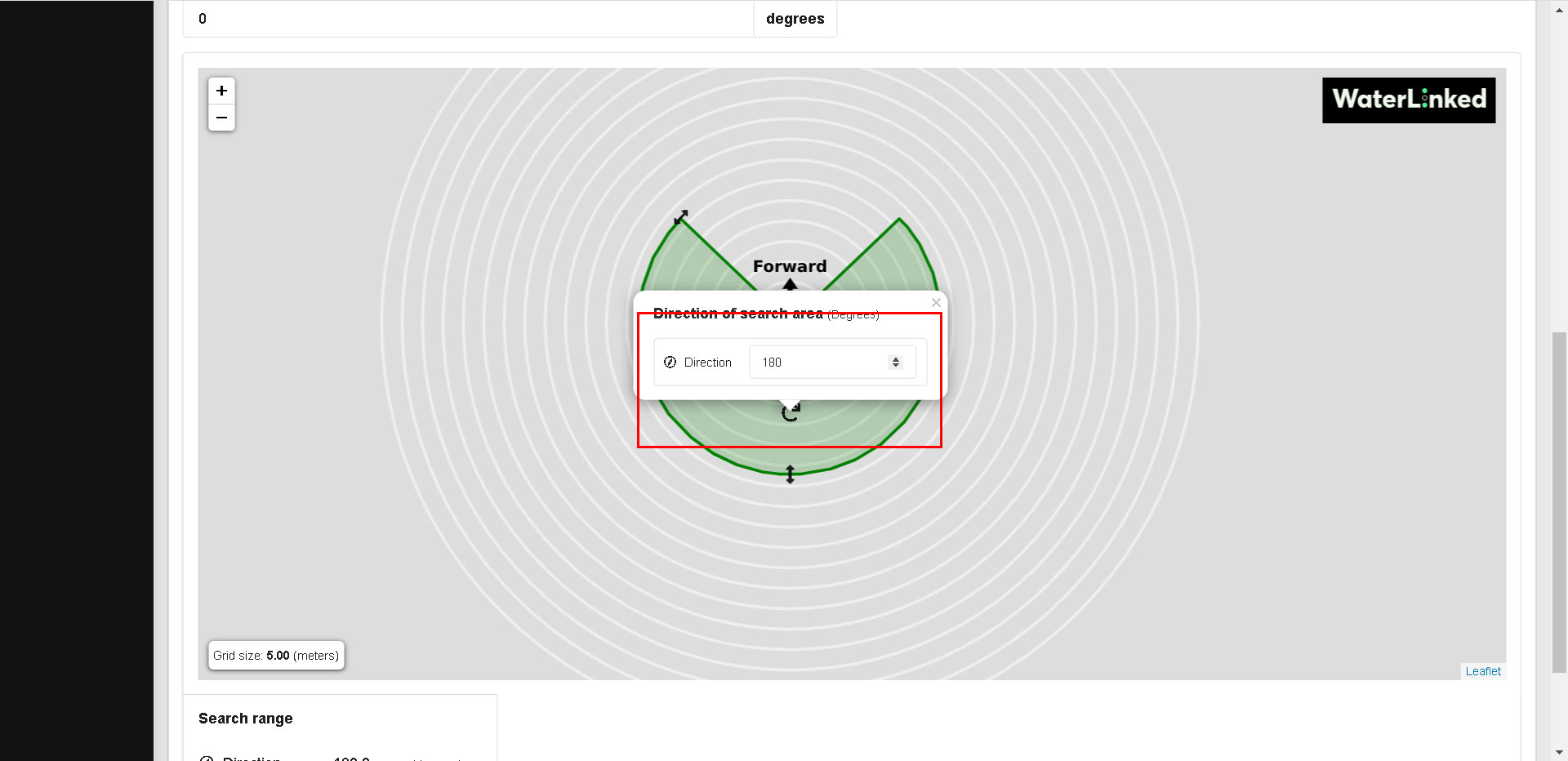
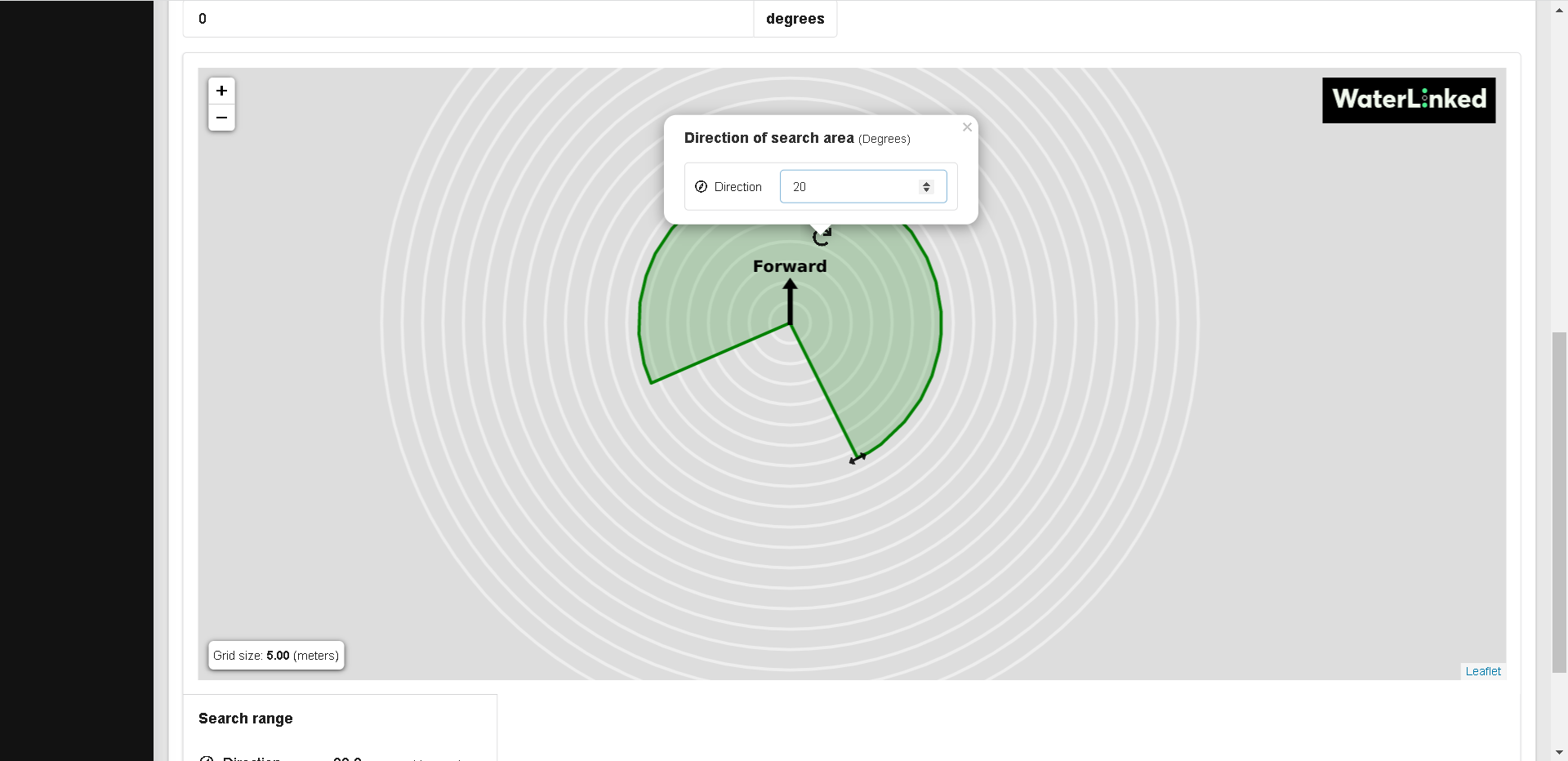
自分の位置とアンテナの位置、角度が表示されますので、これが現実と合っているか確認しながら設定します。各種設定が完了したらApplyをクリックします。
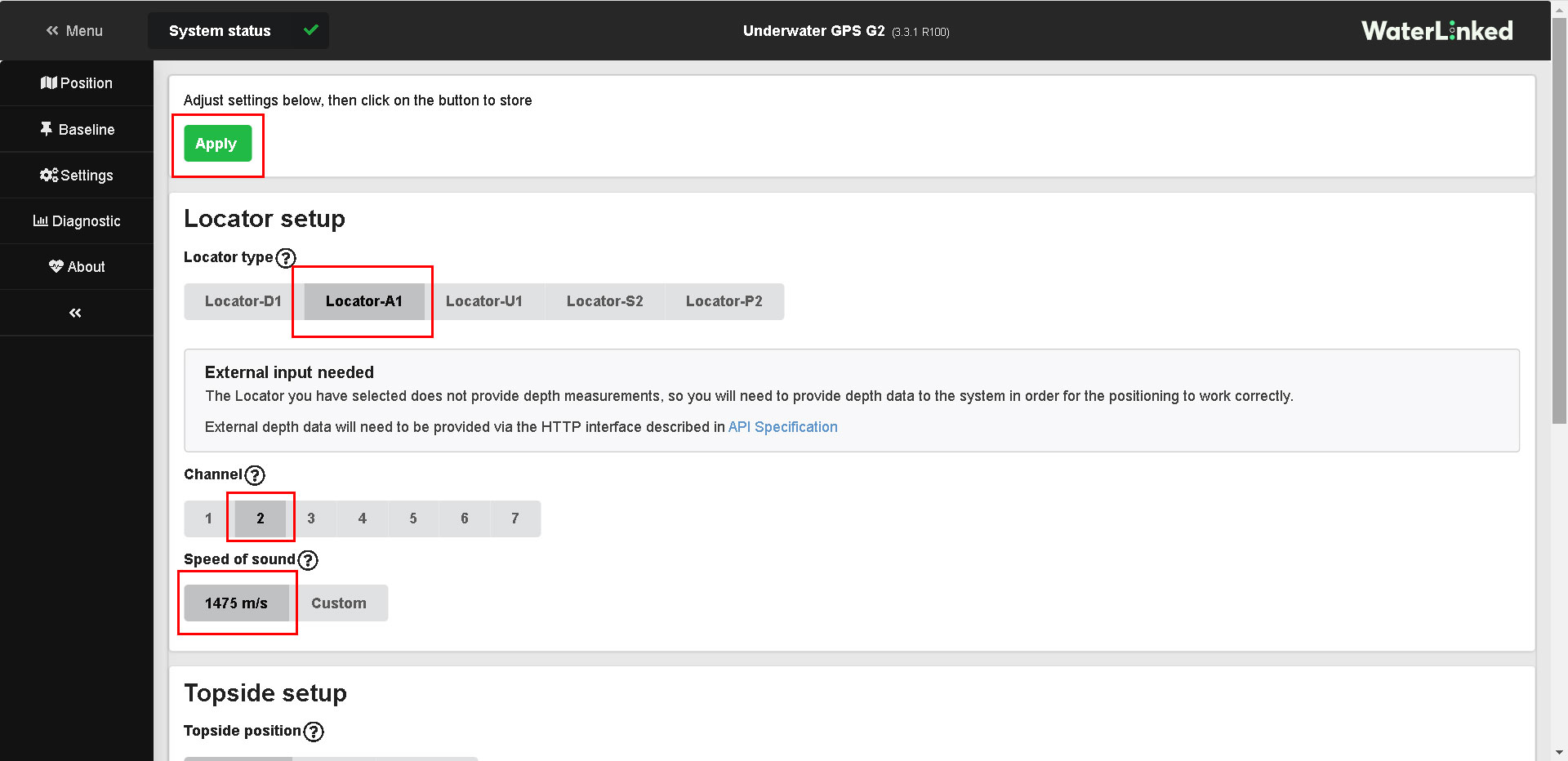
Settings
Locator setup
使用するロケーターに合わせて設定します。弊社納品のBlueROV2の場合はLocator-A1を選択します。
Channel
変更する場合もありますが、基本は2で問題ありません。
Speed of sound
海水、淡水、温度等で変わりますが、とりあえずデフォルト1475m/sで問題ありません。
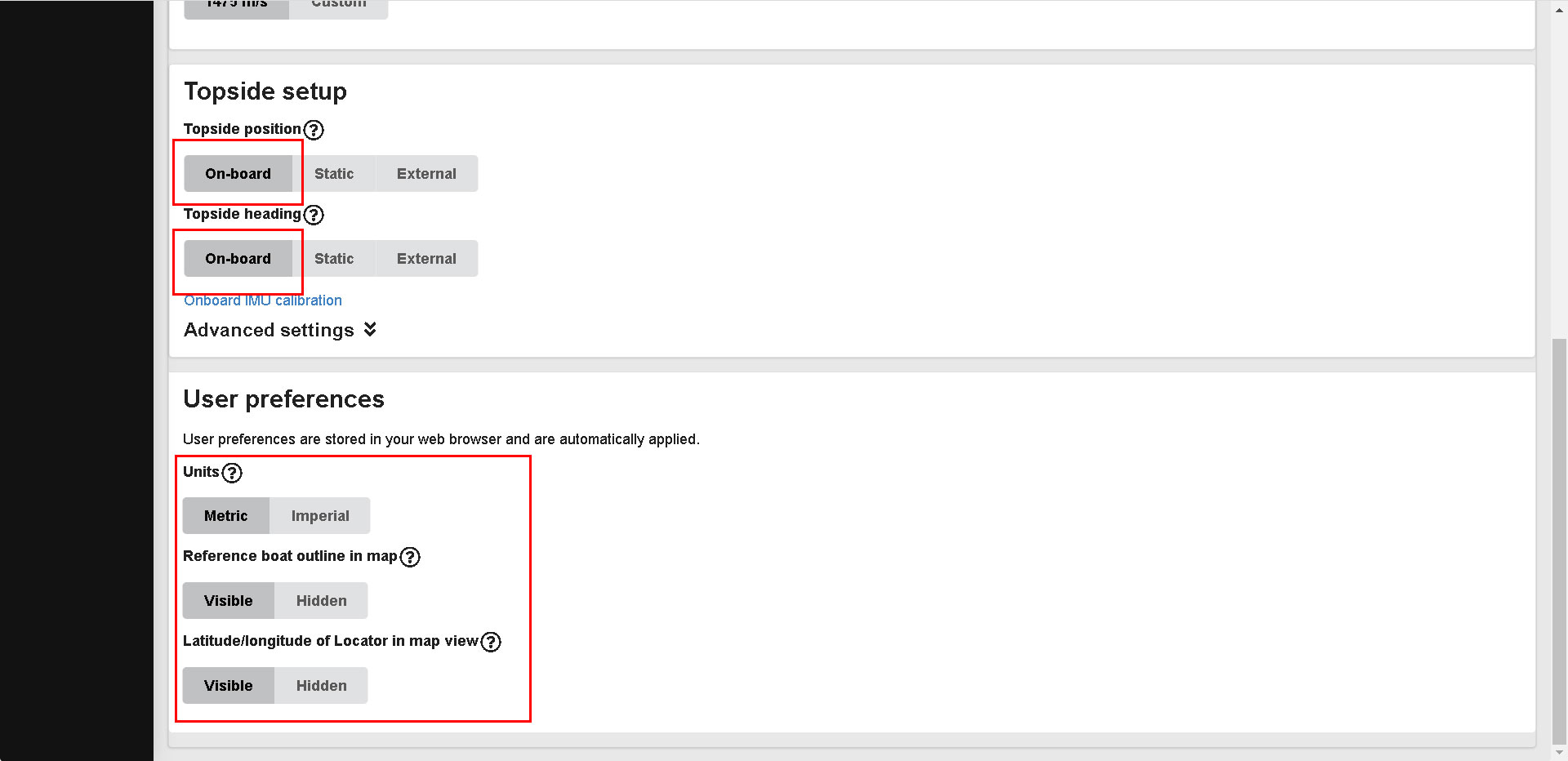
Topside position
On-boardを選択。※用途に応じて変更。
Topside heading
On-boardを選択。※用途に応じて変更。
Units
単位はMetric
Reference boat outline in map
ボートの形を表示させるか非表示にするか。
latitude/longitude of locator in map view
マップビューでのロケーターの緯度/経度の表示、非表示です。
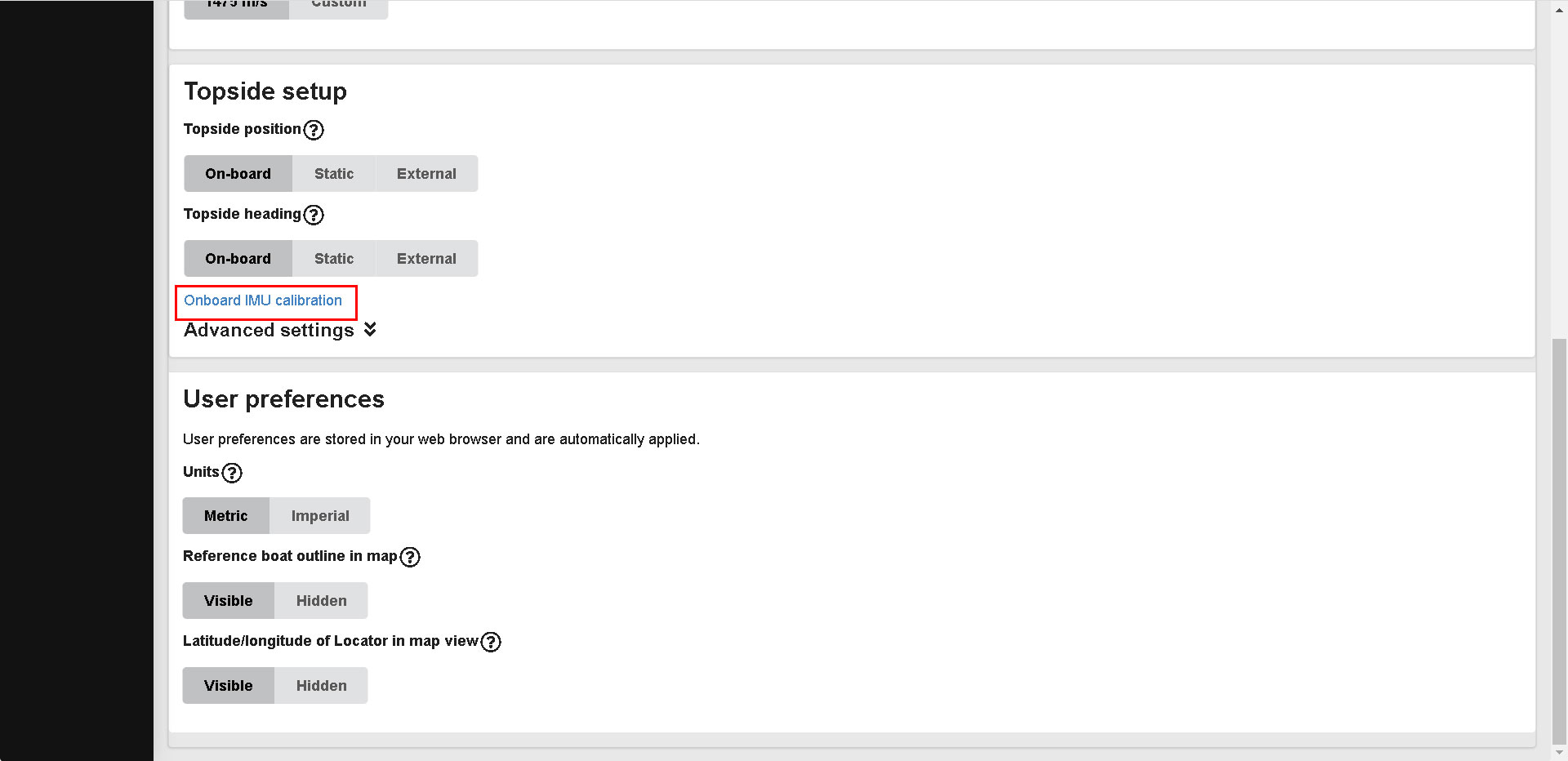
Onboard IMU calibration
Onboard IMU calibrationをクリックしキャリブレーションをします。
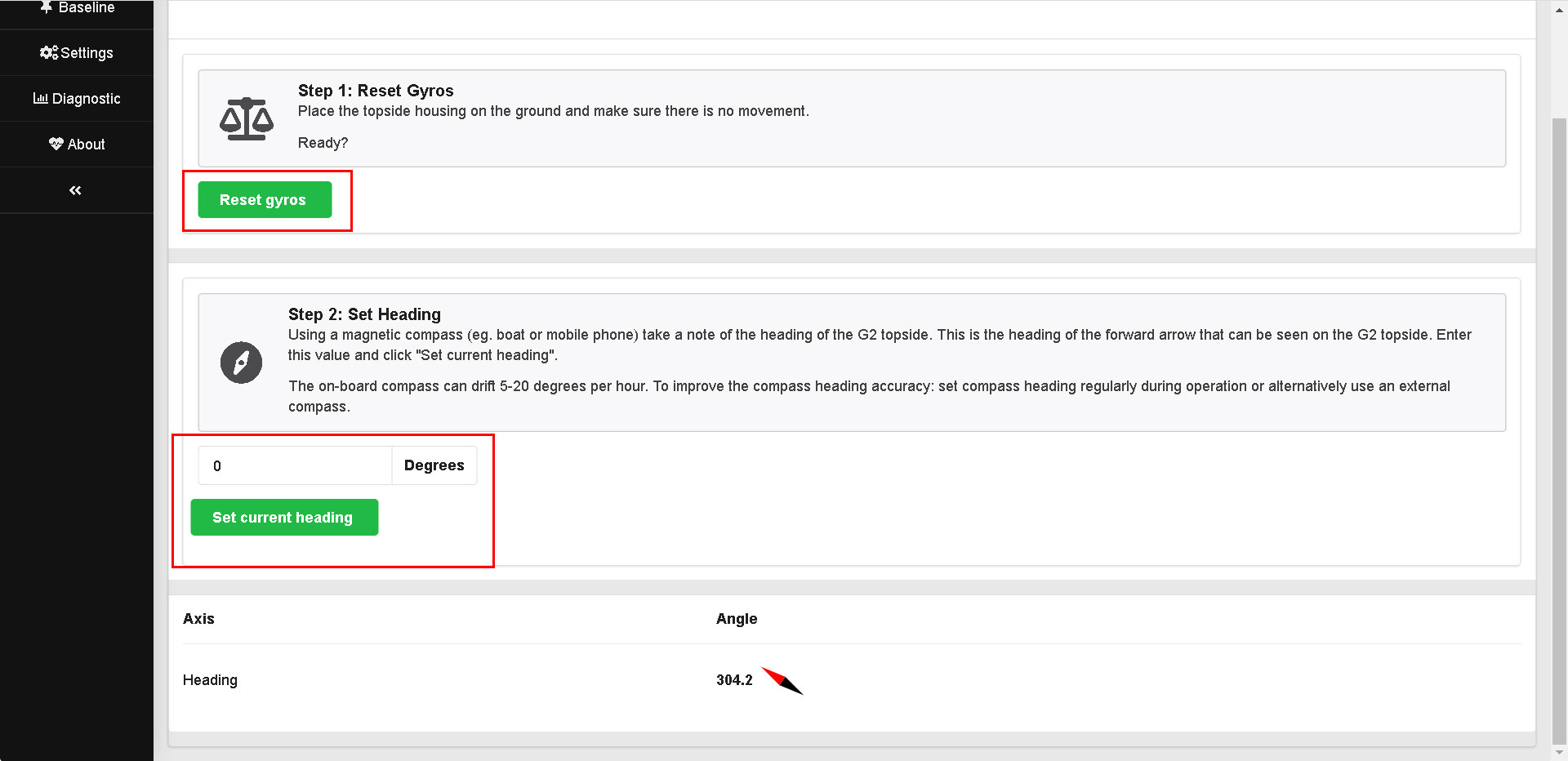
赤枠の部分をクリック。
次にペリカンケースが置かれている状態の方位を数値で入力します。スマホのコンパス等で調べられます。
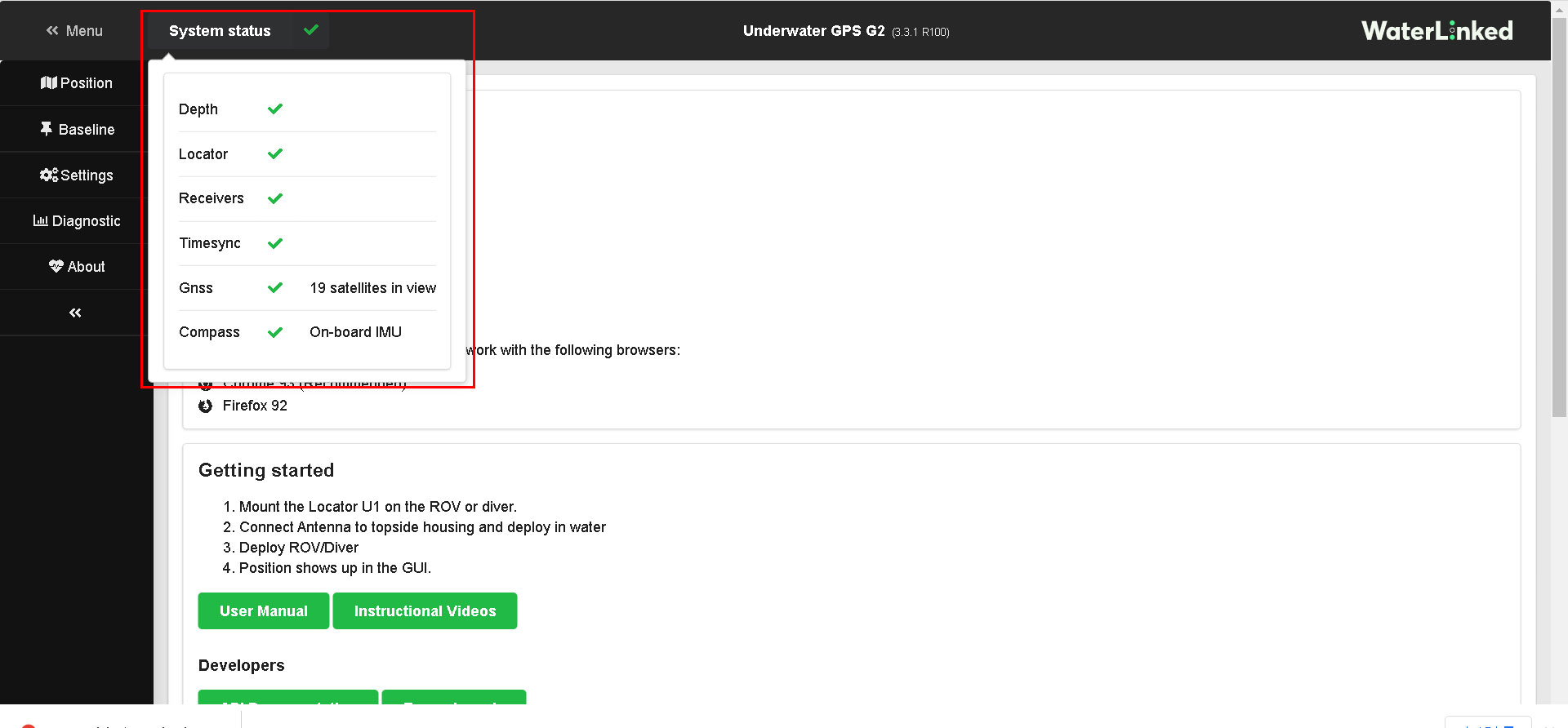
ここまで完了するとステータスが緑に変わると思います。もしエラーが出ていましたら、その部分をご確認ください。
各部のステータスに問題がなければ緑のチェックがつきます。問題がある場合は赤と×になります。
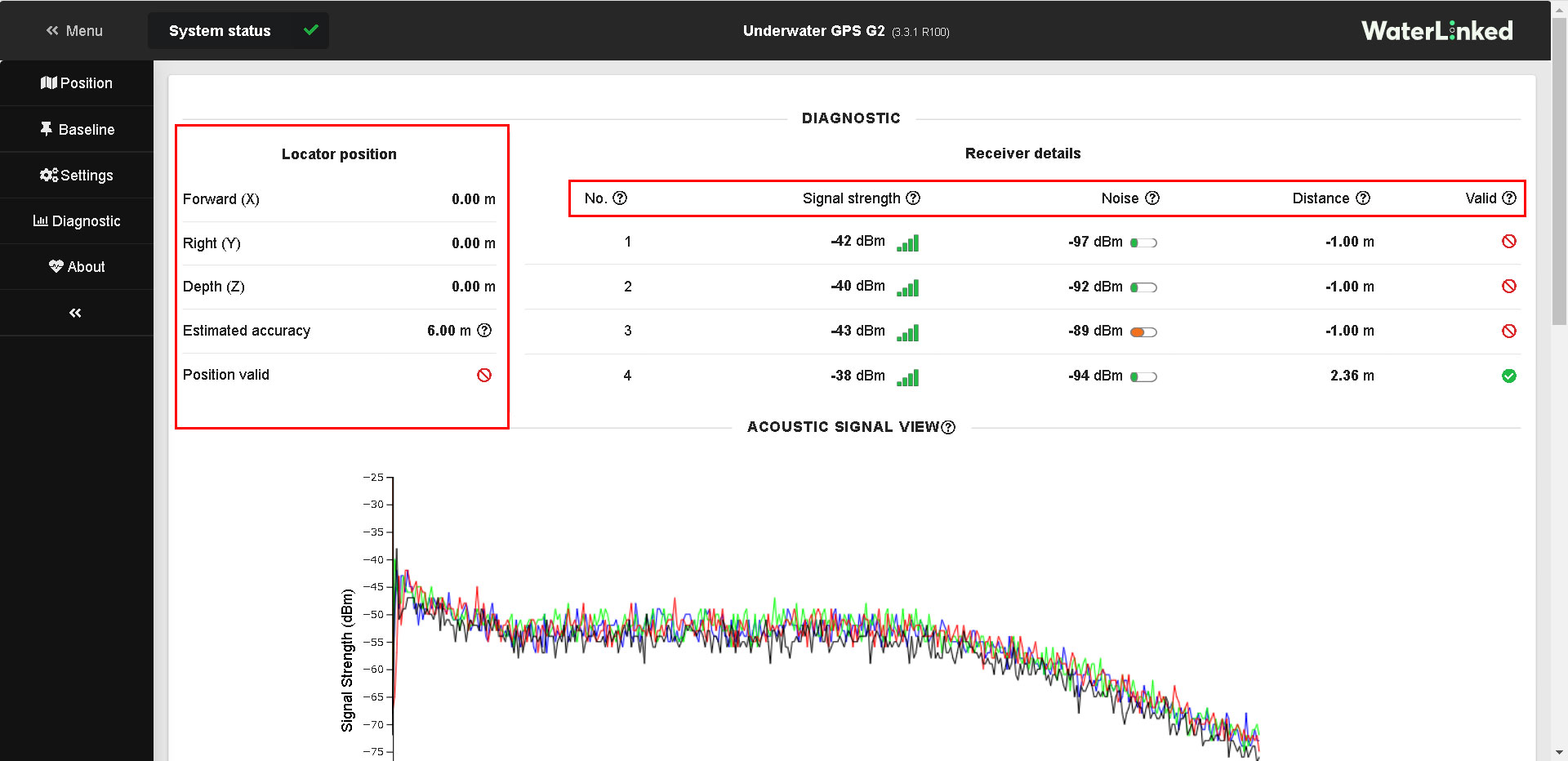
Diagnostic
各種センサー類がどのような反応をしているか数値で確認ができます。
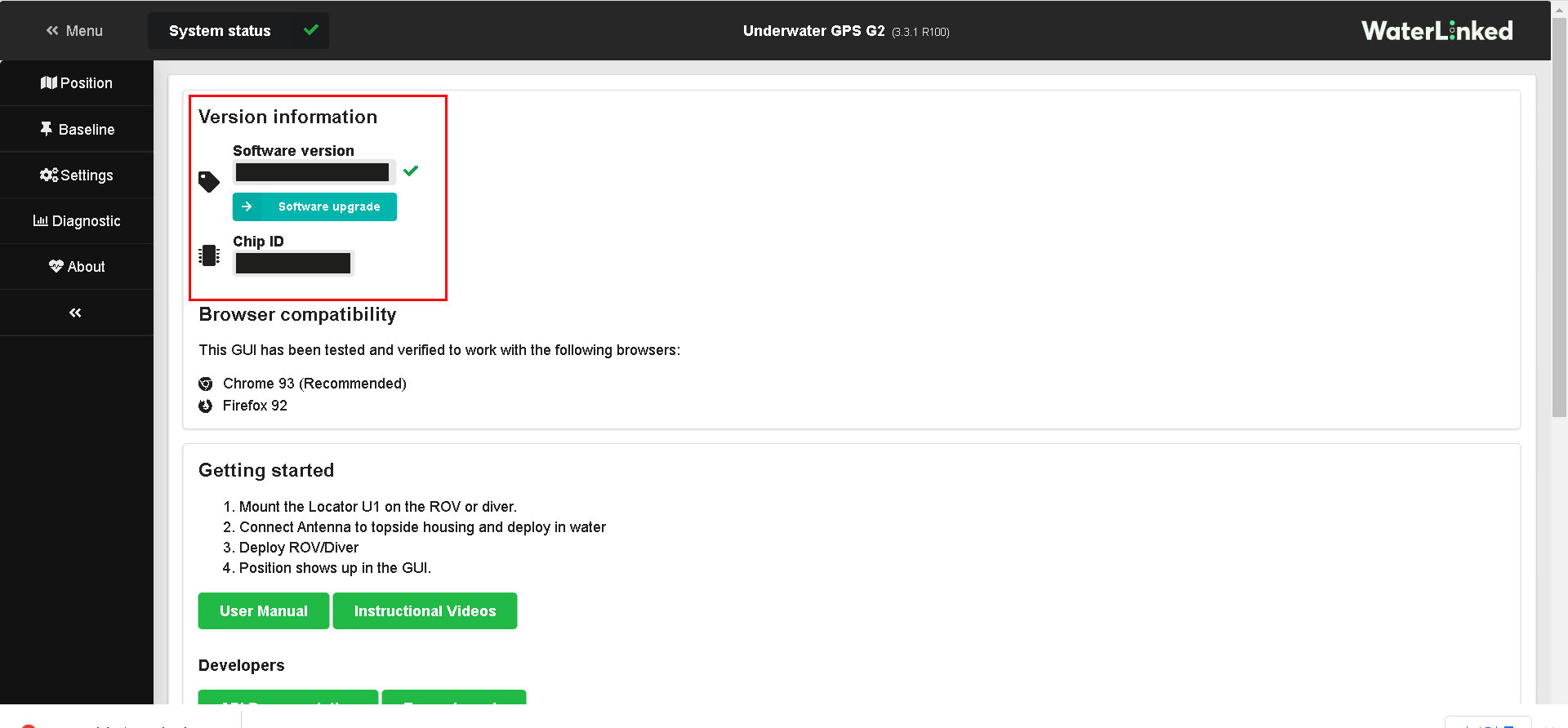
About
機器のシリアル番号やマニュアル、バージョン等が確認できます。
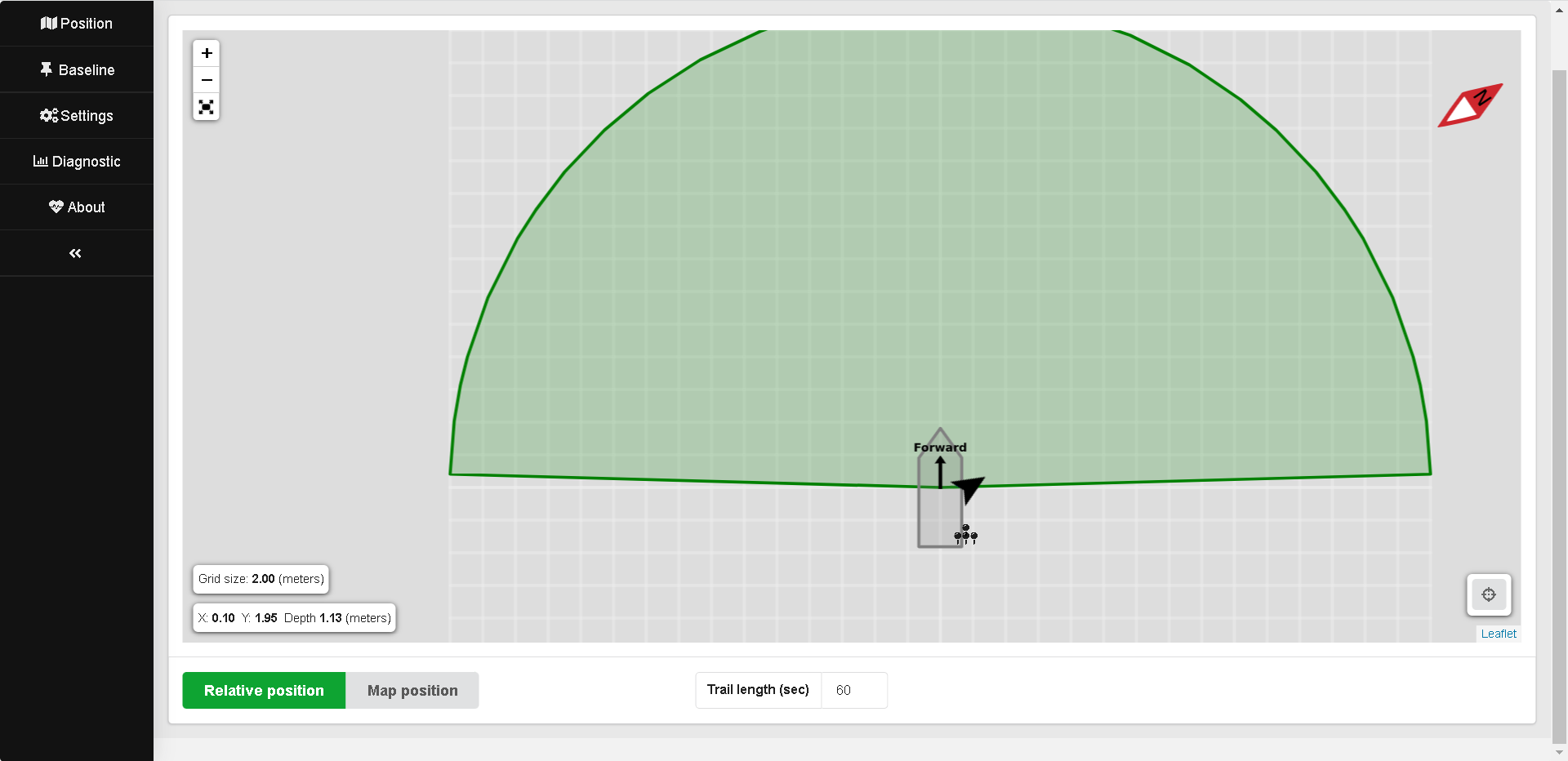
セッティングが完了したら
すべての設定が完了し、ステータスが緑に変わると画面上に機体の位置が表示されます。
すべてが正しく動作している場合は、QGroundControl の地図上で ROVの位置が見つかるはずです。ROVの位置は BlueROV2 画像で示されます。
UGPS トップサイド ハウジングの位置は、QGroundControl のバージョンに応じて赤い矢印または Q シンボルで示されます。小さな「H」アイコンは、ROVの最初の GPS ロックの位置である「ホーム ポジション」を示します。
UGPS の上面位置は、すべてのシステムで確実に表示されるわけではありません。NMEA として UDP ポート 14401 に送信されるため、QGroundControl で設定を確認してください。
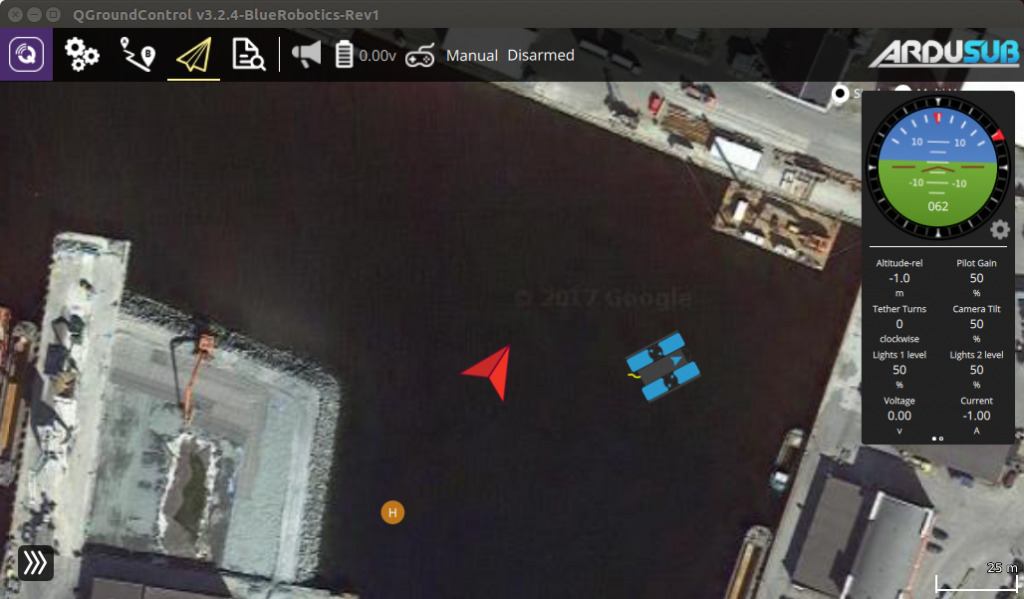
こちらがデモ用の画面です。
-
-
Water Linked Underwater GPS
demo.waterlinked.com







{kind=link}