

弊社はBlue Roboticsの日本正規代理店です。BlueBoatの実証実験も数多く進めていますので、フルサポートでお手伝いできます。
実運用に基づく深い理解とトータルサポート




弊社は、小型無人ボートの分野において、単なる販売者にとどまらず、実際にこれらのボートを運用しています。この実績を通じて、ボートの利点と課題を深く理解しており、その知見を製品開発やカスタマーサポートに活かしています。
さらに、オリジナル製品を自社で開発しているため、お客様のニーズに合わせたカスタマイズや、万が一の際の修理サービスにも迅速かつ柔軟に対応することが可能です。私たちは、製品の販売からカスタマイズ、アフターサービスまで、一貫したサポートを提供しています。
お客様の多様なご要望にお応えできることが、弊社の大きな強みです。
BlueBoatの詳細資料を今すぐ入手!
高性能水上ドローン『BlueBoat』の特徴や導入事例を詳しくご紹介。プロ向けの機体で、水中探査や研究に最適です。詳細なスペックやカスタマイズオプションを含む無料資料をお届けします!

こんな方におすすめ
- 業務で使える水中ドローンを探している
- BlueROV2の価格を知りたい
- BlueBoatの詳細を知りたい
- 弊社のサポートなど詳しく知りたい
BlueBoatは折りたたんで運ぶことができます


基本セットには専用プラダンケースが付属します

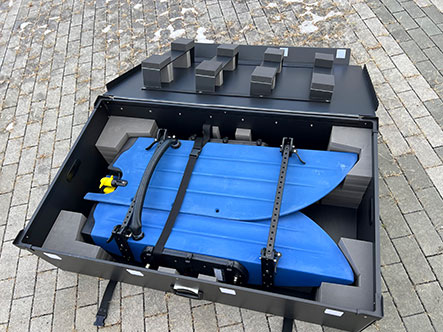


BlueBoatを遠方へ送る場合は専用ケースが安心です。このボートの複雑な形状を梱包するのは大変です。専用ケースがあれば1分以内に完結します。
バッテリーは水中ドローンBlueROV2の物を使えます

BlueBoatは最高クラスの持続力を持っており、最大サポート可能なバッテリーを搭載すると、連続して60時間以上動作します。
1つのバッテリーだけでも9時間以上稼働し、30 km以上の距離を移動できます。
高度な自動航行と直感的操作!BlueBoatで、簡単ミッション設計をすぐに実現
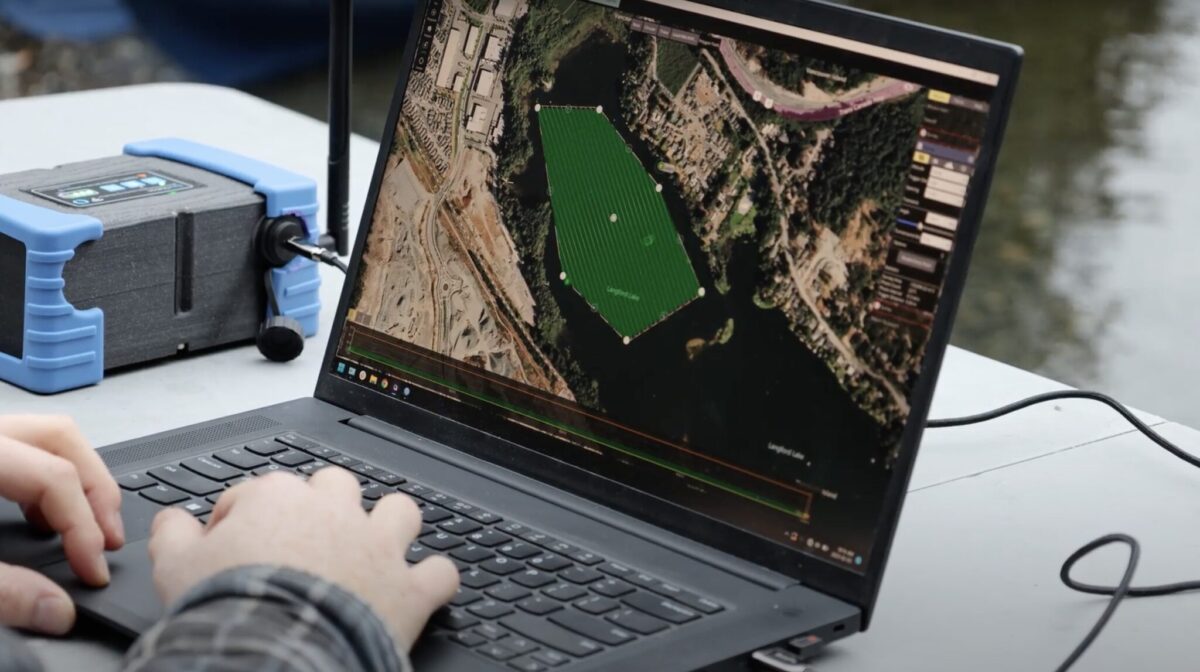
BlueBoatには、ナビゲーターフライトコントローラー、GPS、そしてArduRover制御ファームウェアが含まれています。
これにより、高度な自動航行が可能です。初めから使える状態で、GPSウェイポイントを使った精密なナビゲーション、特定の位置での静止、フォローミー操作、ジオフェンシング、送信機の信号喪失時の自動帰還などが実行できます。さらに、ドラッグアンドドロップでミッションを計画する機能により、複雑なミッションもわずか数分で簡単に設計できます。
もし手動操作をする場合や自動航行のミッションの修了時は、ジョイスティックコントローラーを使ってマニュアルで操縦することができます。
BlueBoatのスペック表








| パフォーマンス | |
| 耐久性 @ 1 m/s (~30 W)、ペイロードなし: | |
| 2 バッテリー (532 Wh、2.4 kg) | 18時間(65km) |
| 4 バッテリー (1064 Wh、4.7 kg) | 36時間(130km) |
| 6 バッテリー (1596 Wh、7.0 kg) | 50時間(180km) |
| 8 バッテリー (2128 Wh、9.3 kg) | 62時間(220km) |
| ソーラーパワー(ユーザー装備) | 不定 |
| 最大速度 (バッテリー 2 個、ペイロードなし) | 3メートル/秒 |
| 最大静推力 | 8.2kgf |
| 定格温度 (空気) | -25~40℃ |
| 定格温度 (水) | 0~40℃ |
| 操舵 | スキッドステアリング |
| ペイロードと拡張機能 | |
| ペイロード容量 (バッテリー + ペイロード) | 15キロ |
| ペイロードパワー | バッテリー電圧 @ 60 A (直接接続) バッテリー電圧 @ 10 A (ヒューズボード) 5V 補助 @ 5 A (ヒューズボード) |
| 利用可能なポートとインターフェース | 3 x シリアル UART イーサネット ( Blue Robotics イーサネット スイッチが必要) 2 x USB 2.0 2 x USB 3.0 1 x 16 ビット ADC (3.3 V) 1 x 16 ビット ADC (6.6 V) |
| 物理的 | |
| 寸法(長さ×幅×高さ) | 120 x 93 x 46 cm (展開時) 120 x 71 x 24 cm (折りたたみ時) 120 x 46 x 20 cm (パッケージ時) |
| 重量(バッテリーまたはペイロードなし) | 14.5キロ |
| フリーボード (バッテリー 2 個、ペイロードなし) | 160mm |
| 最大ドラフト (最大ペイロード) | 320mm |
| 推進 | 2 x M200 モーター、ウィードレス プロペラ付き |
| プロペラ径 | 112mm |
| 航海灯 | 5V 2W LED、ホワイト オールラウンド、PWM プログラム可能な点滅 |
| 一次資料 | LDPE (船体) 30% ガラス入りポリカーボネート アルマイト ステンレススチール |
-

-
機体開発
「業務にピッタリの機材が欲しい」「市販品にはない仕様が必要」 そんなあなたのニーズに応えます! 水中ドローンの組立・改造・修理から、オリジナル機体・無人ボートの開発、点検用機材のカスタマイズまで—— ...
続きを見る
よくある質問
ブルーボートはどのような用途に使えますか?
ブルーボートは、海洋調査、水質モニタリング、ダムや湖沼の深浅測量など、さまざまな用途で使用できます。高精度のカメラと各種センサーを搭載することで、広範囲にわたるデータ収集を効率的に行えます。
ブルーボートの操作方法は難しいですか?初めての人でも使えますか?
ブルーボートは直感的に操作できるインターフェースを備えており、初めての方でも簡単に操作できます。さらに、導入時には操作方法のトレーニングやサポートを提供しているため、安心してご利用いただけます。
ブルーボートの稼働時間はどれくらいですか?
ブルーボートの最大航行距離は約10kmで、天候や使用条件により異なります。バッテリーは通常9時間以上の連続運転が可能で、追加バッテリーによって運用時間を延長することもできます。
荒天時や波の高い海でもブルーボートは安全に使えますか?
ルーボートは頑丈な設計となっており、荒天時や波の高い環境でも安定した航行が可能です。ただし、非常に厳しい天候では安全のため運用を控えることを推奨します。
導入後のサポートやメンテナンスはどのように行われますか?
導入後のサポートとして、メンテナンスや修理のサービスを提供しています。また、技術サポートチームが電話やメールでの対応も行っていますので、安心してご利用いただけます。
ブルーボートの購入前にデモを依頼することはできますか?
はい、購入前にブルーボートのデモンストレーションを依頼することが可能です。お問い合わせいただければ、スケジュールを調整し、実際の使用状況をご覧いただけます。
ブルーボートをカスタマイズして特定の用途に対応させることは可能ですか?
はい、ブルーボートはお客様のニーズに応じてカスタマイズが可能です。特定のセンサーや装置を搭載するなど、ご要望に合わせたカスタマイズを行いますので、お気軽にご相談ください。
BlueBoatに関連したマニュアル
-

-
BlueBoatとローランスソナーによる水路測量
今回は、BlueBoatとローランス社のソナーを使って地図を作る方法について解説します。 ローランスエリートFS7は、3つの異なるソナーモードを持つトランスデューサ(変換器)を搭載しています。このシス ...
続きを見る
-

-
BlueBoatソフトウェアのセットアップ
BlueBoatの操作を円滑に行うためには、ソフトウェアおよびネットワークの設定が必要です。 そこで本記事では、BlueBoatのソフトウェアやネットワーク、コントローラーなどのセットアップについて、 ...
続きを見る
-
-
Omniscan450サイドスキャンソナーのBlueBoatへの統合
Cerulean Omniscan 450 SSはBlueBoatとシームレスに統合され、サイドスキャンソナーイメージングを通じて水中の物体を特定し識別することで、海底の地図作成を支援します。このガイ ...
続きを見る
BlueBoatのオプション
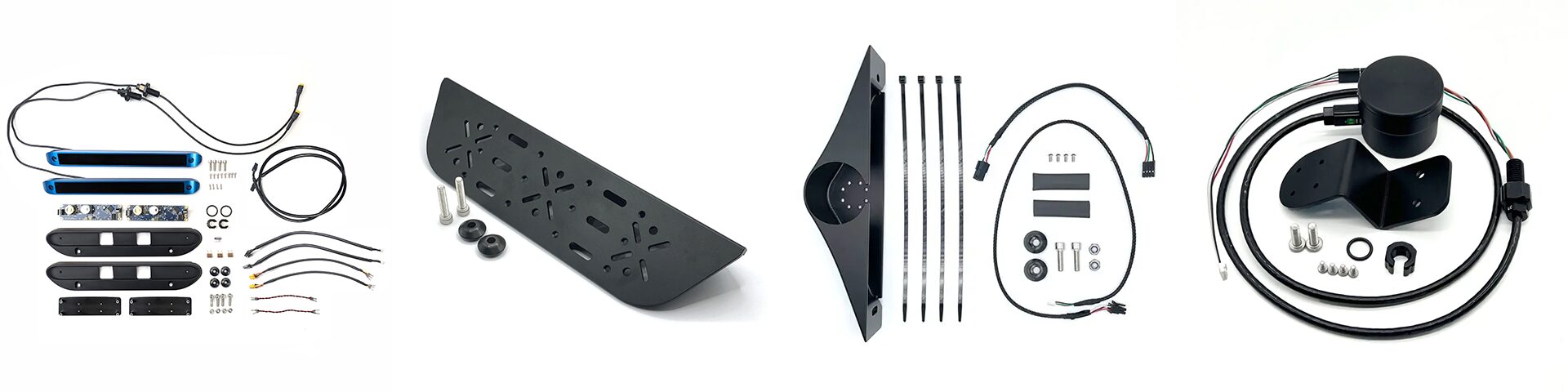
オムニスキャン450サイドスキャンソナー

このサイドスキャンソナーは、BlueBoatに簡単に搭載できます。
これにより、水中の物体の位置特定や識別、海底のマッピングが可能になります。このソナーは、BlueBoatでの使用に最適化されており、BlueOSのCerulean SonarViewアプリケーションを使用してリアルタイムでデータを視覚化することができます。
BlueBoatペイロードブラケット

このブラケットは、BlueBoatの船体にある取り付け穴に装着して、ペイロードを水面下に運搬します。
複数の取り付け穴があるため、センサーやエンクロージャーを取り付けることが可能です。BlueBoatへの取り付けに必要なハードウェアも付属しています。
Ping2ソナー高度計とエコーサウンダー

Ping2ソナーは、水中で最大100メートルの距離を測定できるシングルビームエコーサウンダーです。
25度のビーム幅、300メートルの深度定格、およびオープンソースのソフトウェアインターフェースを備えており、海洋ロボット用の強力なツールとなっています。
BlueBoat用Ping2統合キット

このキットを使用すると、Ping2 Echosounderを水路測量のためにBlueBoatに簡単に取り付けることができます。
ソナーを保護するウィードレスマウントや、BlueBoatの電子機器に接続するために必要なケーブルが含まれています。
-
-
水中ドローンBlueROV2
Blue Robotics製水中ドローンBlueROV2の日本正規代理店・株式会社チック。組立・調整済みで納品し、深度100m/300m仕様、ソナーやDVL等のカスタマイズ、操縦・メンテナンス講習、修 ...
www.rov-fun.com

相談から納品までの流れ
step
1ご相談・お問い合わせ
- まずはお気軽にご相談ください。使用目的やご希望の仕様について詳しくお伺いし、最適な機材をご提案いたします。
step
2ヒアリング・打ち合わせ
- お客様のニーズを詳細にヒアリングし、具体的な要件やご希望のカスタマイズについてお打ち合わせを行います。オンラインまたは対面で対応可能です。
step
3お見積りのご提案
- ご要望に基づき、ボートのカスタマイズ内容やオプションを含めたお見積りを提示いたします。ここで、納期や予算についてもご確認いただけます。
step
4ご注文確定
- お見積り内容にご納得いただけましたら、ご注文を確定させていただきます。ご注文後、正式に製作を開始いたします。
step
5製造・カスタマイズ
- ご注文いただいた内容に基づき、専門の技術者が組み立て・カスタマイズを行います。進行状況は随時ご報告いたします。
step
6納品前テスト・調整
- 納品前に各機能のテストと最終調整を行い、万全の状態でお届けします。必要に応じて、お客様にも動作確認をしていただきます。
step
7納品・操作説明
- 完成したボートをお客様に納品いたします。納品時には、操作説明やメンテナンス方法についても詳しくご案内します。
step
8アフターサポート
- 納品後も、使用中のサポートやメンテナンス、アップグレードのご相談を受け付けております。安心して長くご使用いただけるよう、サポート体制を整えています。





