

必要な部品と工具
このガイドで使用されるすべてのコンポーネント
使用する部品
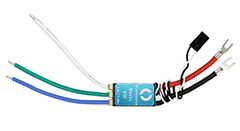 |
基本ESC T200スラスター用の双方向電子速度制御装置 |
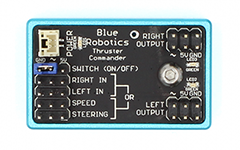 |
スラスター・コマンダー 当社製スラスターおよびESCを簡単に導入・制御できるユニット |
 |
スイッチ 防水ケースへの取り付けが容易で、最大5Aまで対応 |
必要なモノ
- 0.1インチ(2.54mm)ピッチの3ピン圧着コネクタハウジング ×1個
- 0.1インチハウジング用メス圧着ピン ×2個
- ユニバーサル圧着工具 ×1個
- ワイヤーストリッパー(対応範囲:30~20ゲージ) ×1個
- LiPoまたはLi-Ion 4Sバッテリー ×1個
スイッチの組み立て
スイッチ取り付けガイドに記載された手順に従って、スイッチを正しく組み立ててください。
※ このガイドでは エンドキャップの取り付けは不要 です。
プロジェクト内で WTEにスイッチをすばやく取り付ける方法 を紹介します。
作業が完了すると、下図のように標準構成で組み上がったスイッチが完成します。

スイッチコネクタの改造
標準構成のスイッチは、そのままではスラスター・コマンダーと互換性がありません。
POINT
そのため、あらかじめ装着されている オスピン を取り外し、代わりに メスピン を取り付ける必要があります。
改造手順
- 既存のコネクタを取り外す
両方のワイヤーから、オス圧着ピンと単一ピンハウジングを切り取ります。
その後、各ワイヤーの先端から青い被覆を約5mmほど剥きます。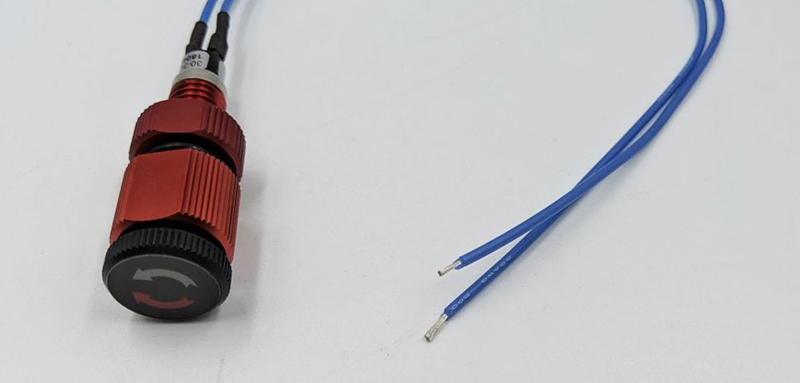
- 新しいメス圧着ピンの取り付け
ワイヤ端子用の圧着工具を使用し、被覆を剥いた各ワイヤー端にメス圧着ピンを取り付けます。
※ ピンがしっかりと圧着され、抜けないことを確認してください。
- コネクタハウジングへの挿入
3ポジション(0.1インチ/2.54mmピッチ)の圧着コネクタハウジングにワイヤーを挿入します。
1本は外側のいずれかのポジションに、もう1本は中央のポジションに差し込みます。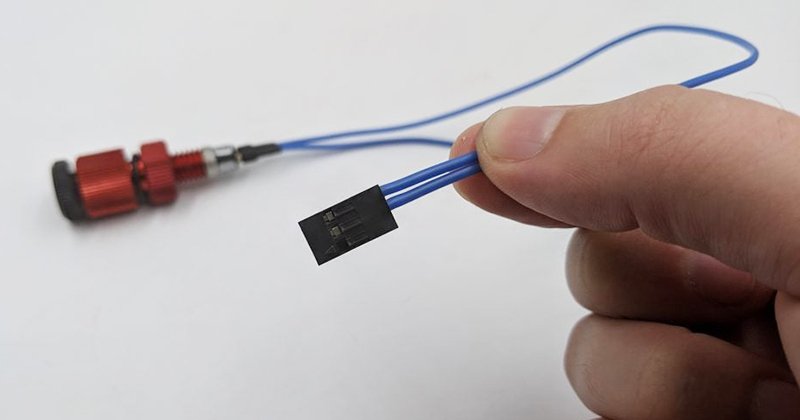
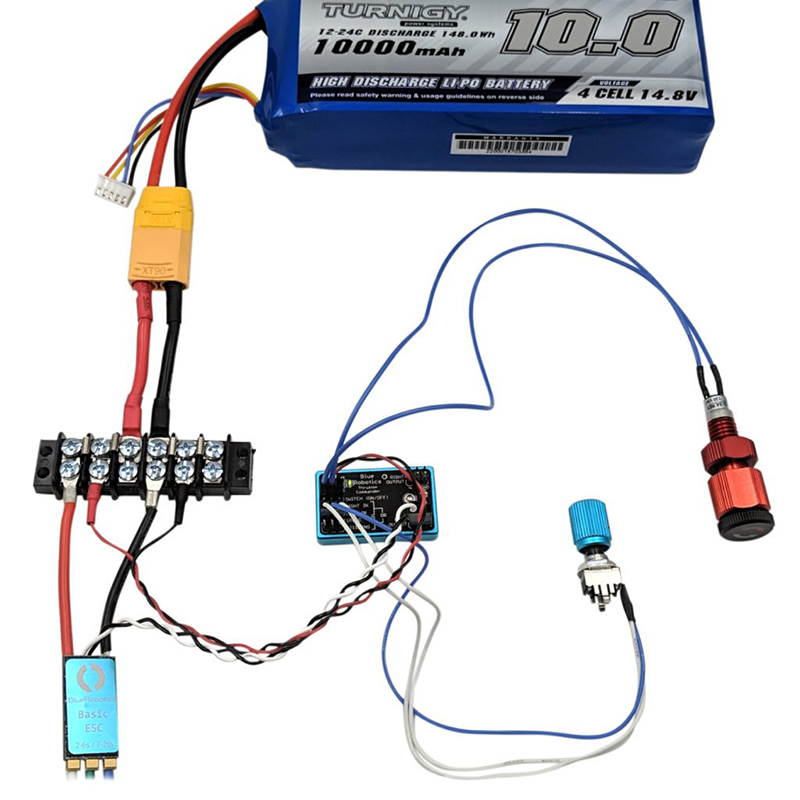
スラスター・コマンダー 配線アセンブリ
- 基本配線の組み立て
スラスター・コマンダーのガイドに記載された手順に従い、電源線・信号線・ESC(電子速度制御装置)の配線を正しく組み立ててください。
参照セクションは「バッテリーとESCの接続」です。
本ガイドでは、ESCとスラスターを1組のみ使用します。
左右いずれかの側を選んで構いません。必要に応じて、追加のESCおよびスラスターを接続することも可能です。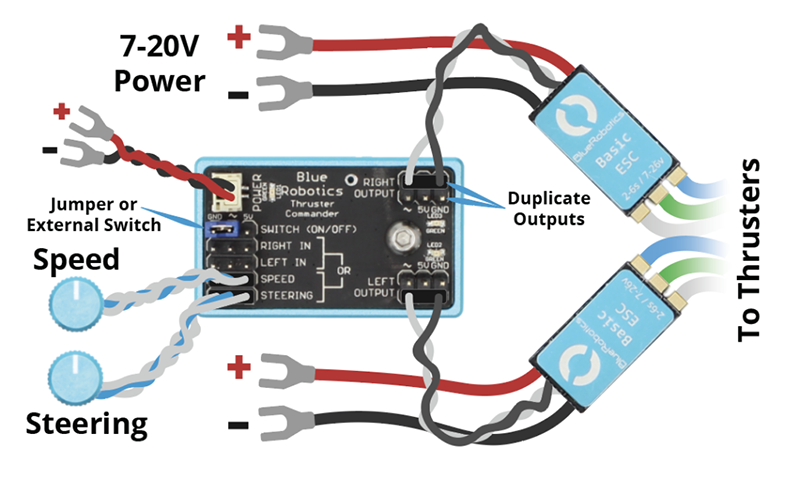
スラスター・コマンダー ガイドでは、スラスターをすぐに稼働させたり、有人スラスタープロジェクトを立ち上げたりするための手順が紹介されています。 - ポテンショメータの接続
ポテンショメータの1つを「SPEED」入力ピンに接続します。 - ESCおよびスラスターの接続
Thruster Commanderキットに付属する3極端子台を、ESCの相線端子に接続します。
続いて、スラスターの相線を対応する端子台に接続してください。 - 配線完成図
これで、下図のような構成のスラスター・コマンダー アセンブリが完成します。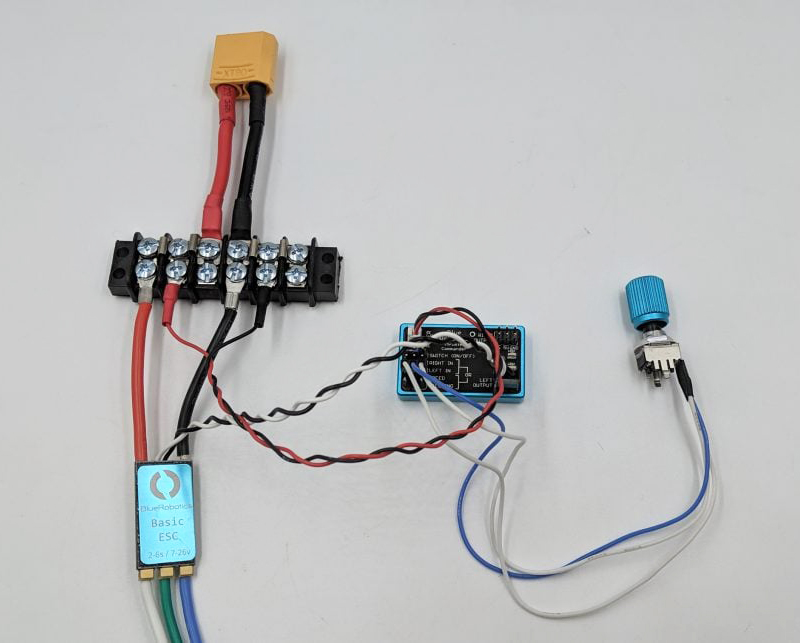
- スイッチ入力の準備
「SWITCH (ON/OFF)」入力端子から、青いジャンパーピンを取り外します。 - スイッチの接続
SWITCH入力端子に、3ポジションのメス圧着ハウジングを取り付けます。
1本のワイヤを GND(接地) に、もう1本を 中央ピン(〜) に接続します。
右端のピン(5V)は使用しません。※ ワイヤを接続しないでください。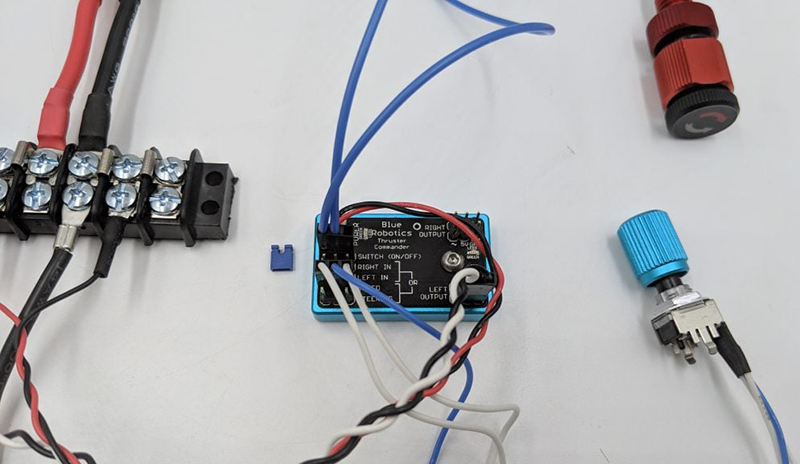
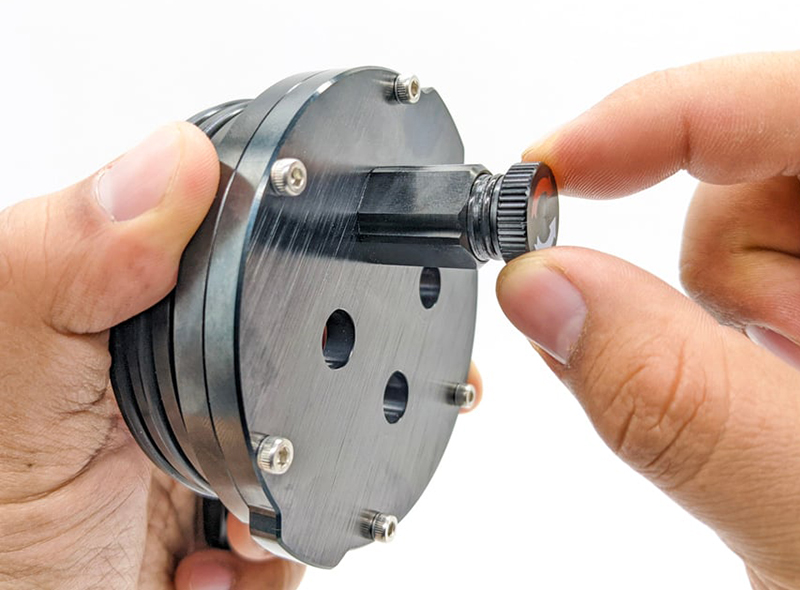
操作
- スイッチを開く
ノブを左に回し、ネジ山から完全に外れるまで回してスイッチを開きます。
※ ノブをペネトレータから完全に取り外さないでください。 - SPEEDポテンショメータの位置を調整する
SPEEDポテンショメータのノブを左右に回して、中央(ニュートラル)位置に合わせます。 - 電源を接続する
バッテリーをXT90コネクタに接続してシステムを起動します。
スラスターの巻線から「ピッ」という高音のビープ音が5回 鳴ります。
ESCの初期化について詳しくは、スラスター・コマンダーガイドの「操作 – ESC初期化」を参照してください。 - スイッチを閉じる
ポテンショメータを中央位置に保ったまま、スイッチノブを右に回して完全に閉じ、止まるまで押し込み固定します。 - スラスターの動作確認
SPEEDポテンショメータのノブを少し(端まで回さずに)回すと、スラスターが一方向に回転を開始します。 - スラスターの停止と再起動
スイッチを右に回すとスイッチが開き、スラスターが停止します。
スイッチを左に回すと、SPEEDポテンショメータを再調整しなくても、設定済みの速度でスラスターが再起動します。 - 完了
これで操作完了です。
アセンブリ全体をWTEまたは防水ボックスに収納すれば、各部品を乾燥した状態で安全に保管できます。





{kind=link}