

BlueROV2の電源系統には、電源監視モジュールと5V6A電源が含まれています。
電源監視モジュールは、バッテリーの状態をリアルタイムで監視し、電圧、電流、バッテリー残量の情報を提供します。5V6A電源は、BlueROV2の電子機器に安定した電力を供給するためのもので、最大6アンペアの電流を供給します。
電源監視モジュール
電源監視モジュールは、BlueROV2またはカスタムの海洋ロボットプロジェクトに搭載されたPixhawkオートパイロットにアナログ電流および電圧検知を提供します。
PixhawkのArduSubファームウェアは電源監視モジュールをサポートしており、QGroundControlを介してバッテリーレベルと消費電流を視覚的に示します。
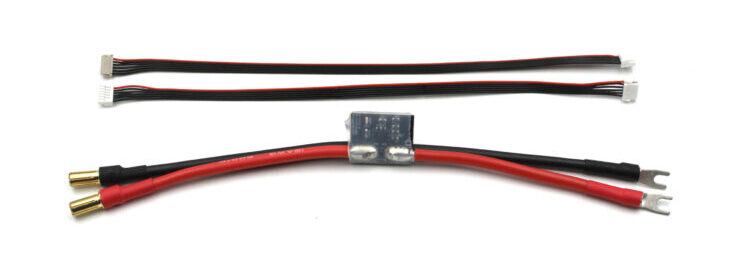
5V6A電源

この電源は、最大6Aで5Vの電力を供給します。 7V~26Vの入力電圧に対応し、熱損失を最小限に抑えたスイッチングコンバータを使用します。2つの標準サーボスタイルコネクタが付属しており、サーボ用のNavigatorまたは Pixhawk 5vレール、Raspberry Pi、またはその他の5vデバイスに簡単に電力を供給できます。
商品内容
- 5V 6A電源 × 1
仕様
| パラメータ | 値 | |
|---|---|---|
| 電気 | ||
| 供給電圧 | 7-26V | 2S-6S Li-po/Li-ion バッテリー |
| 出力電圧 | DC5ボルト | |
| 出力電流 (最大) | 6アンペア(複合出力) | |
| 入力コネクタ | 非絶縁スペード | |
| 出力コネクタ | 3 ポジション 0.1 インチ (2.54mm) 圧着コネクタ ハウジング | |
| 製品 | ||
| 長さ | 37mm | 1.45インチ |
| 幅 | 18mm | 0.71インチ |
| 身長 | 6mm | 0.24インチ |
| 入力ワイヤの長さ | 140mm | 5.5インチ |
| 出力ワイヤの長さ | 115mm | 4.5インチ |
バッテリー電源ケーブル

仕様
| 物理的スペック | ||
|---|---|---|
| 全長 | 489mm | |
| ペネトレータ間の長さ | 258㎜ | |
| コネクタ | 5.5mmボルト | |
| 深度 ※1 | 950m | |
※1 現在のペネトレータ設計に基づく深度
スイッチ(Switch)Blue Robotics

このスイッチを使用すると、水密エンクロージャー内で回路を開くことなくオンとオフを切り替えることができます。最大10.5アンペアの電流を扱うことができ、取り付けはネジやジップタイで行うことができます。スイッチがオンになっているかどうかを示すLEDが内蔵されており、コンパクトで丈夫なデザインです。


-

-
水中ドローンBlueROV2用-純正リチウムイオンバッテリー
BlueRobotics社は、水中ドローンBlueROV2とBlueBoat(ブルーボート)用のバッテリーを提供しています。 これらは最先端のパフォーマンスを発揮するために設計され、現行品から大型スラ ...
続きを見る
-

-
BlueROV2用外部電源装置
この高電圧電源システムを利用することで、BlueROV2はテザー経由で電力を直接供給できます。これにより、バッテリーを必要とせず、無制限に運用することが可能となります。 さらに、安全性を重視した設計が ...
続きを見る






{kind=link}