
アドバンストROVエレクトロニクスパッケージは、ROVに必要なすべての電子装置をArduSubを搭載して提供します。
本記事では、アドバンスドROVへの接続方法と組み立て方法を説明しますので、ぜひ参考にしてください。

なお、ハードウェアとソフトウェアがどのように連動するかについては、ArduSubのドキュメントをご覧ください。
パーツおよびツール
必要なもの(キットには含まれていません)
- ROVと地上のコンピュータとの通信用に、少なくとも2本のワイヤーを備えたケーブル(テザー、ネットワークケーブル、または単に2本の通常のワイヤー)
- 1x イーサネットケーブル
- 1x ミニUSB-USB Aケーブル
- 小型(#1)プラスドライバー
- 小型(2mm)マイナスドライバー
あると役立つアイテム
- マルチポジション端子台(配電用)
- イーサネット-USBアダプター
SDカード
キットには、Raspberry Pi 用コンパニオンソフトウェアがプリインストールされたマイクロSDカードが含まれています。
そのため、アダプターからマイクロSDカードを取り出し、Raspberry Pi のマイクロSDカードスロットに取り付けてください。
また、Pixhawkは、データログの記録にマイクロSD カードを使用します。
マイクロSDカードスロットにプリインストールされているはずですので、確認してください。
電子機器の取り付け
このステップで必要なもの
- 1x Raspberry Pi 3B
- 1x Pixhawkオートパイロット
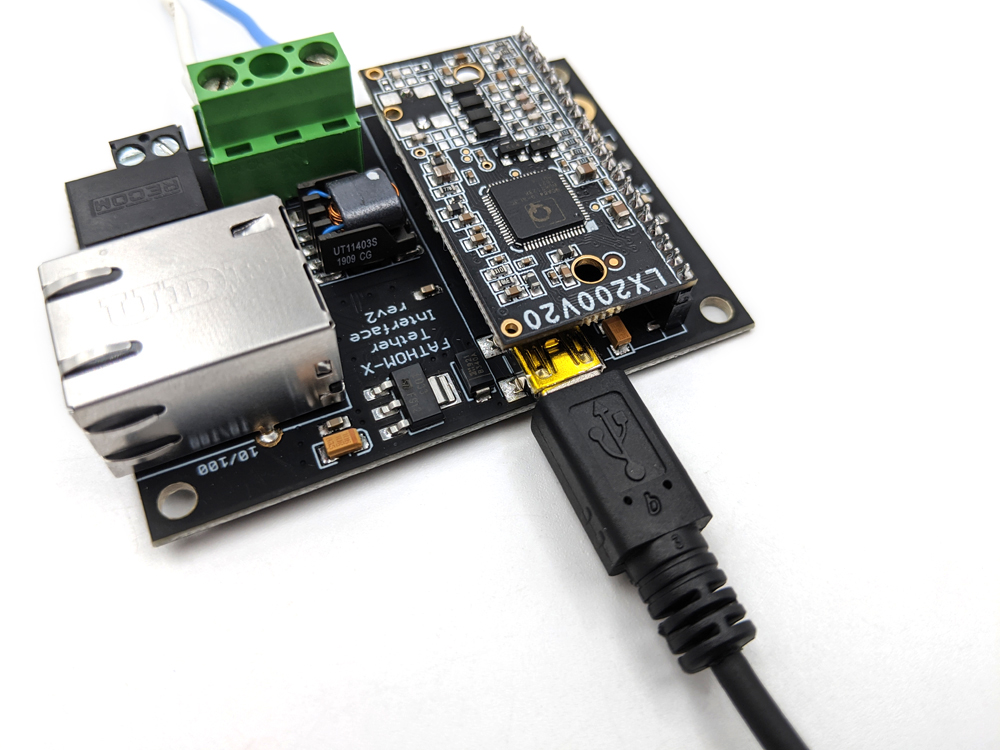
- 1x Fathom-Xインターフェースボード
- 1x Pixhawkシェルフ
- 8x プラスネジ
- 6x 小型の白いスペーサー
- 小型プラスドライバー
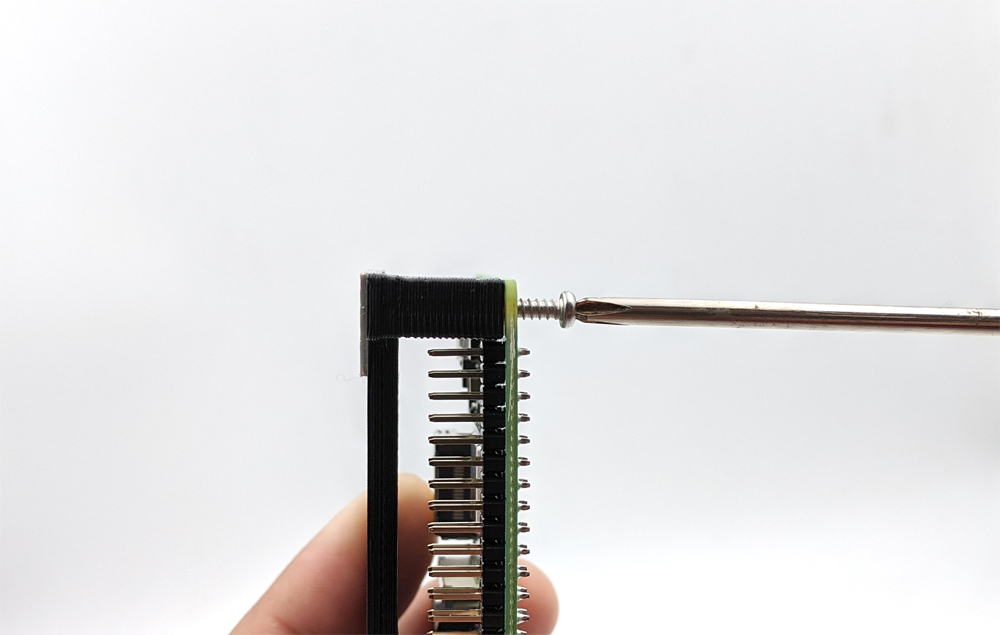
まず、PixhawkシェルフをRaspberry Piの上に置き、プラスネジ2本で固定します。

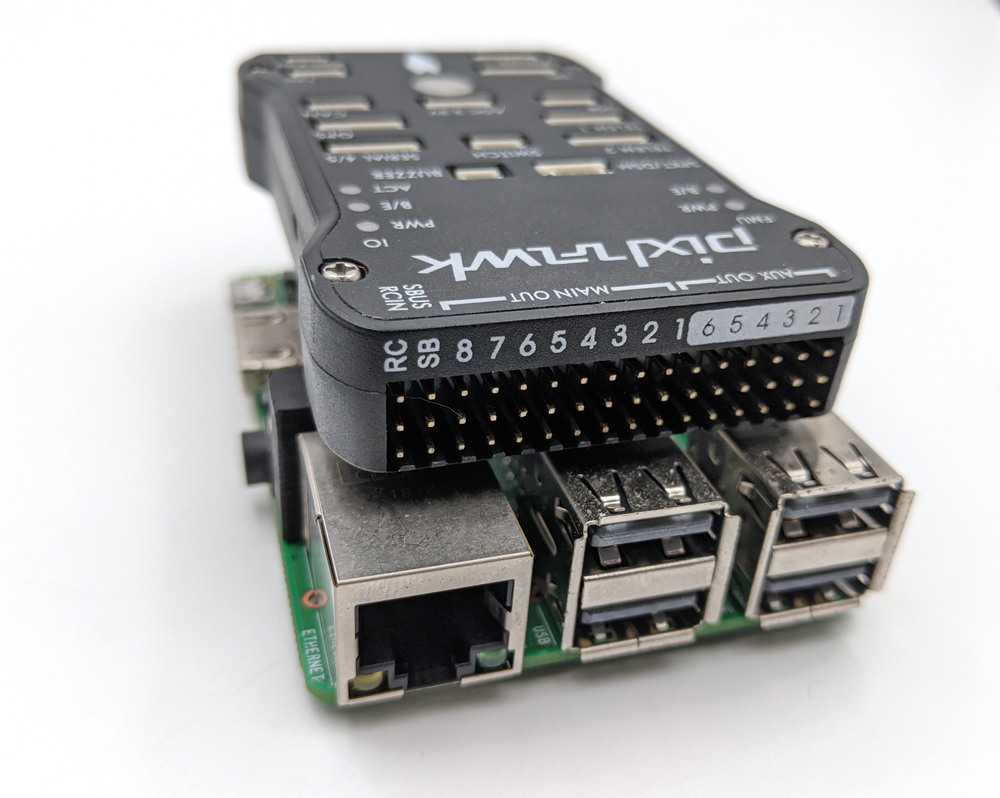
続いて、Pixhawk シェルフのマウントテープのカバーを外し、Pixhawk を上に貼り付けましょう。
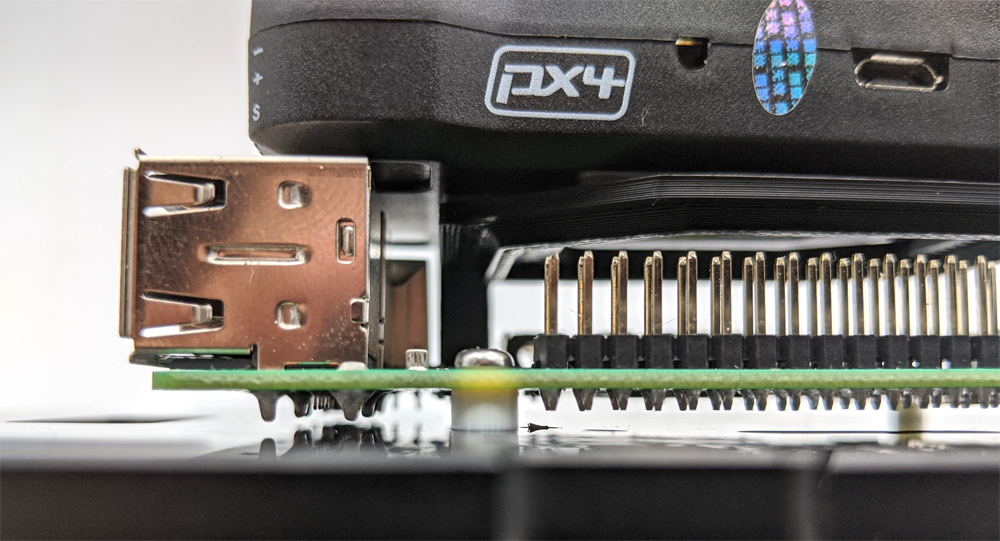
Pixhawkのサーボレールは、Raspberry PiのUSBポートと同じ側になるようにしてください。
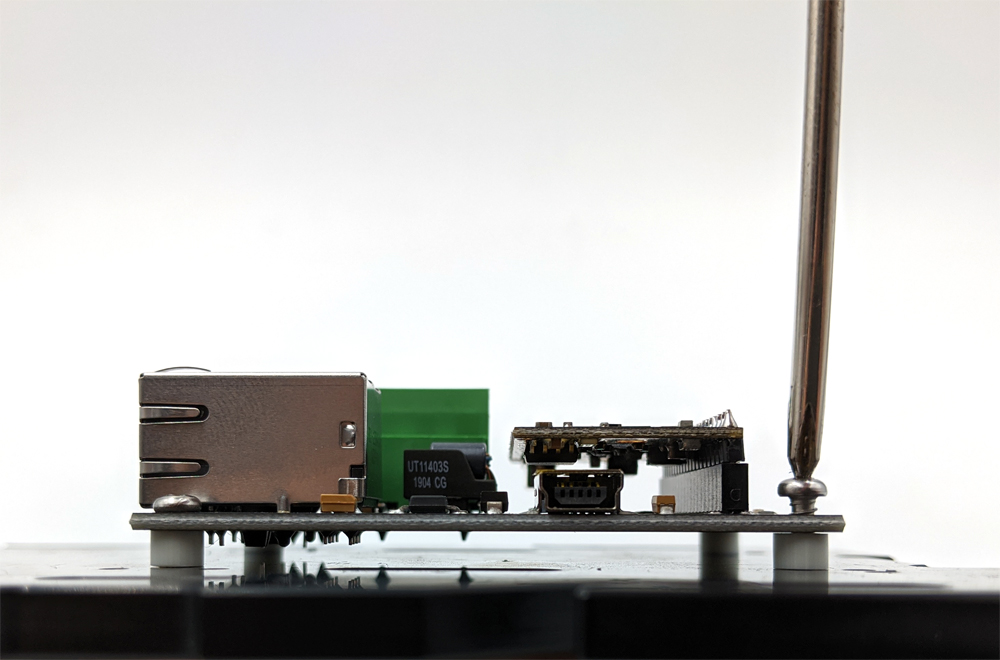
さらにプラスネジ2本と小型の白いスペーサー2個を使って、Raspberry Pi/Pixhawkアセンブリを車両または電子機器トレイに取り付けます。
残りのプラスネジ4本とスペーサー4本は、Fathom-Xボードを車両や電子機器トレイに取り付けるために使用します。
ポイント
ハードウェアパッケージには、さらに4つのM3ソケットネジが含まれている場合があります。これらはアドバンストエレクトロニクスパッケージには使用されません。
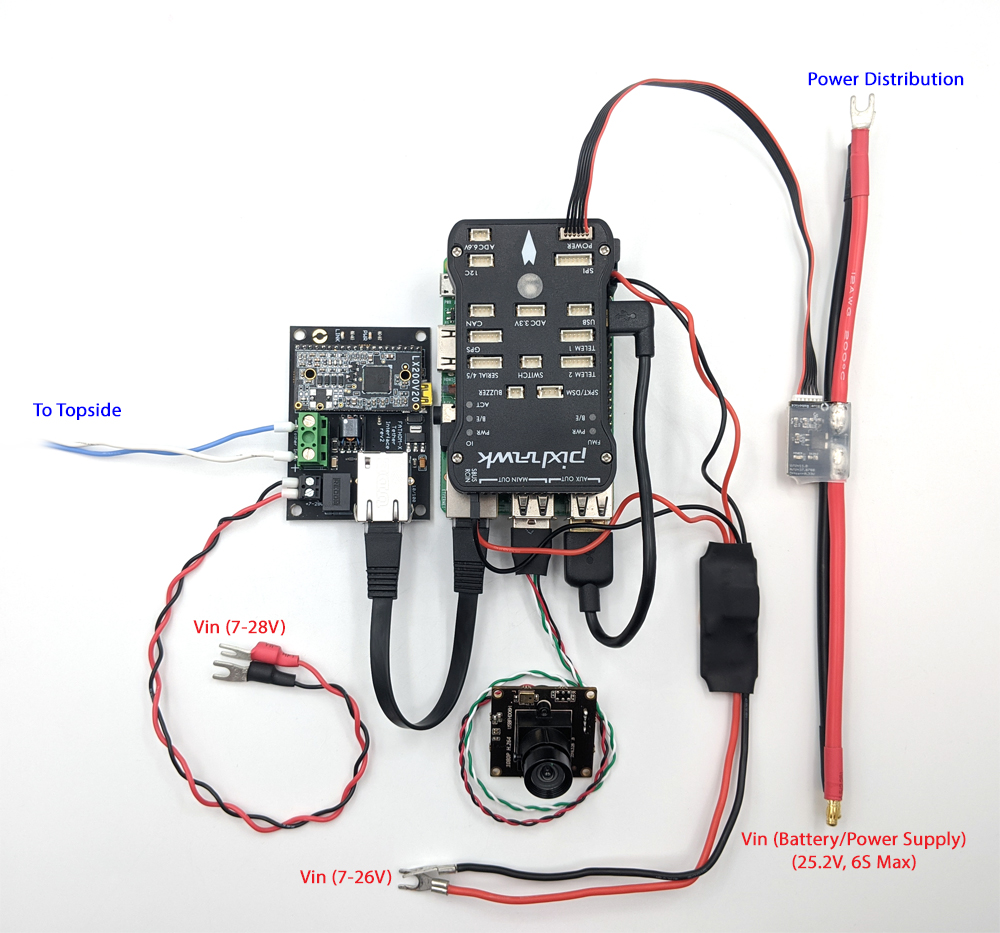
ワイヤーとケーブルの接続
PixhawkとRaspberry Piの接続には、左アングルのMicro USBケーブルを使用します。

付属のUSBケーブルを使って、ローライトUSBカメラをRaspberry Piに接続します。
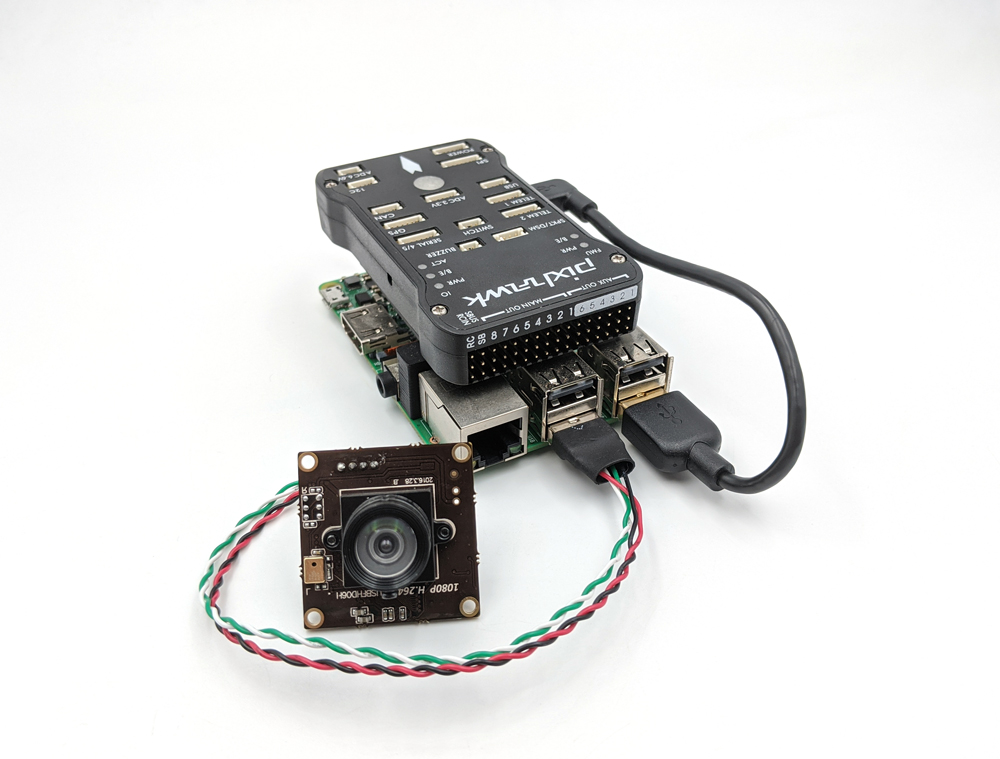
Fathom-Xボードセットに同梱されている6インチのイーサネットケーブルを使用して、車両に搭載されたFathom-XボードとRaspberry Piを接続します。

電源の接続
パワーセンスモジュール
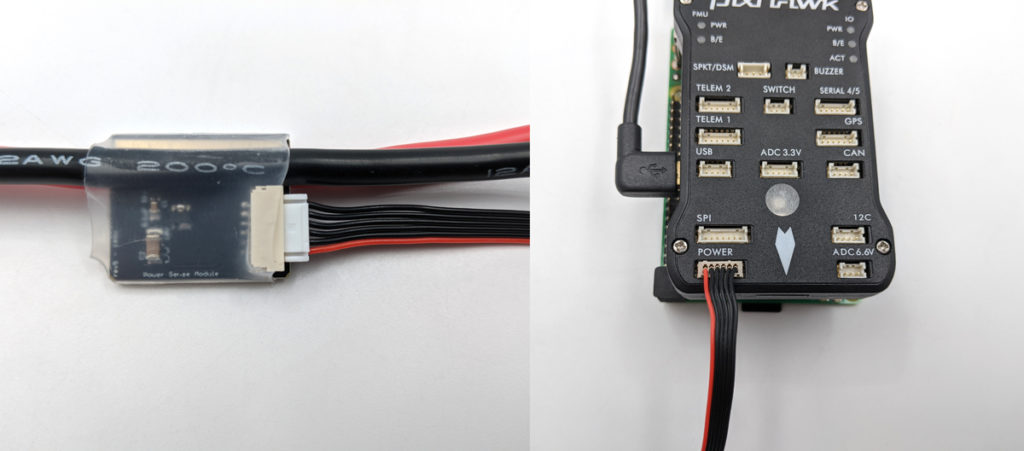
パワーセンスモジュールは、バッテリーまたは電源と配電ブロックの間に接続され、電圧と電流の感知情報を提供するパーツです。
3.5mmオスコネクターで終端するパワーセンスモジュールの端は、適切なアダプター(付属していません)を介してバッテリーまたは電源に接続してください。

注意ポイント
組み立てが完了し、システムをテストする準備ができるまでは、バッテリーや電源を接続しないでください。
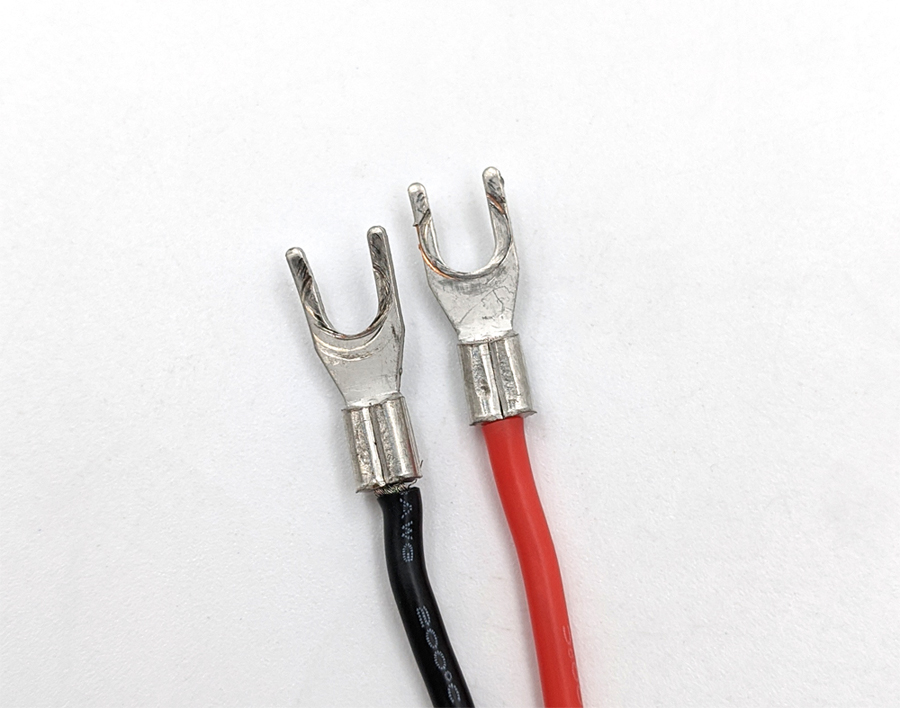
もう一方のスペードコネクターは、車両の配電ブロックに接続しましょう。

パワーセンスモジュールに同梱されているケーブルは、両端が異なるコネクタになっています(6 ポジション JST-GH から DF13)。
上記をもとに、JST-GHコネクタをパワーセンスモジュールのJST-GHソケットに差し込み、DF13コネクタをPixhawkのDF13「POWER」ソケットに差し込んでください。
ポイント
パワーセンスモジュールはPixhawkに5V電源を供給しません。
5V 6A電源
5V 6A電源は、Raspberry PiとPixhawkサーボレールに電力を供給するために使用します。
まず、5V 6A電源のスペードコネクタを配電ブロックに接続しましょう。
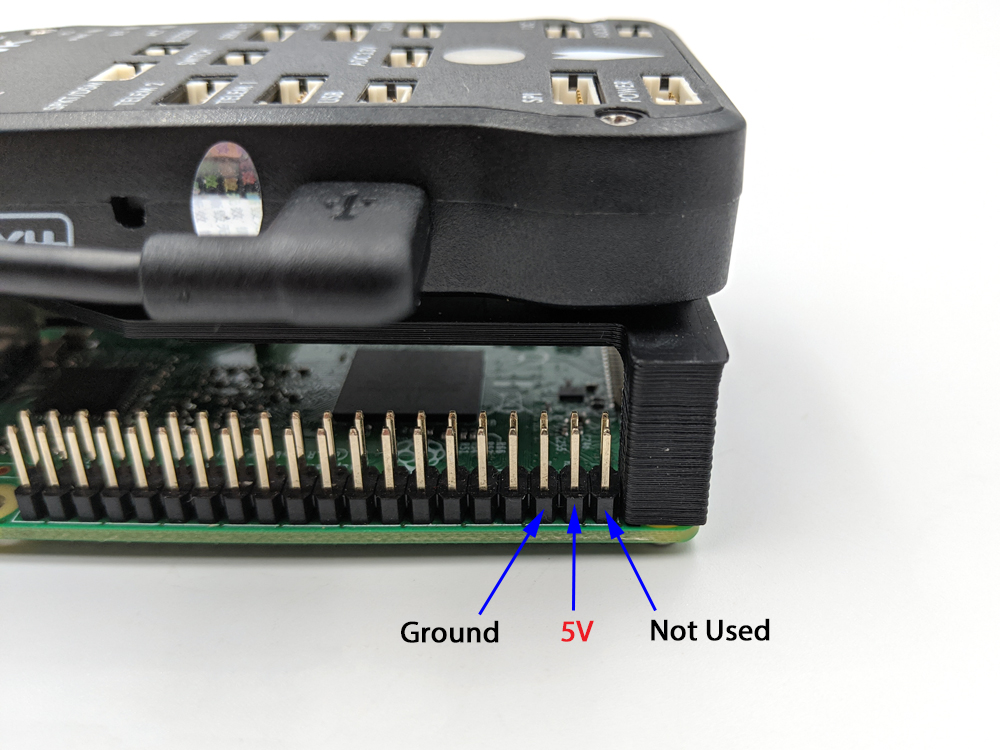
5V 6A電源の反対側には、3ポジションのサーボコネクターが2つあります。
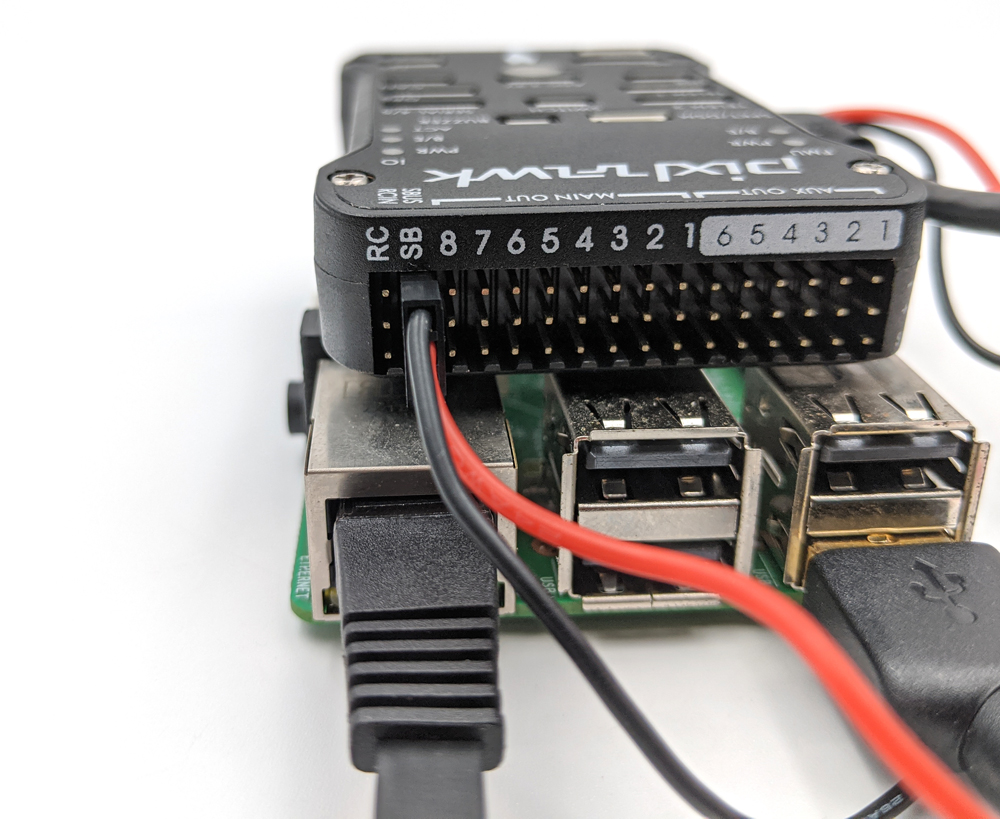
これらのコネクタの1つを、Raspberry PiのGPIOピン2、4、6に差し込んでください(GPIOピンの番号についてはこちらを参照)。
5V(赤)線はGPIOピン4に、アース(黒)線はGPIOピン6に接続しましょう。
コネクタの残りの位置は使用しません。
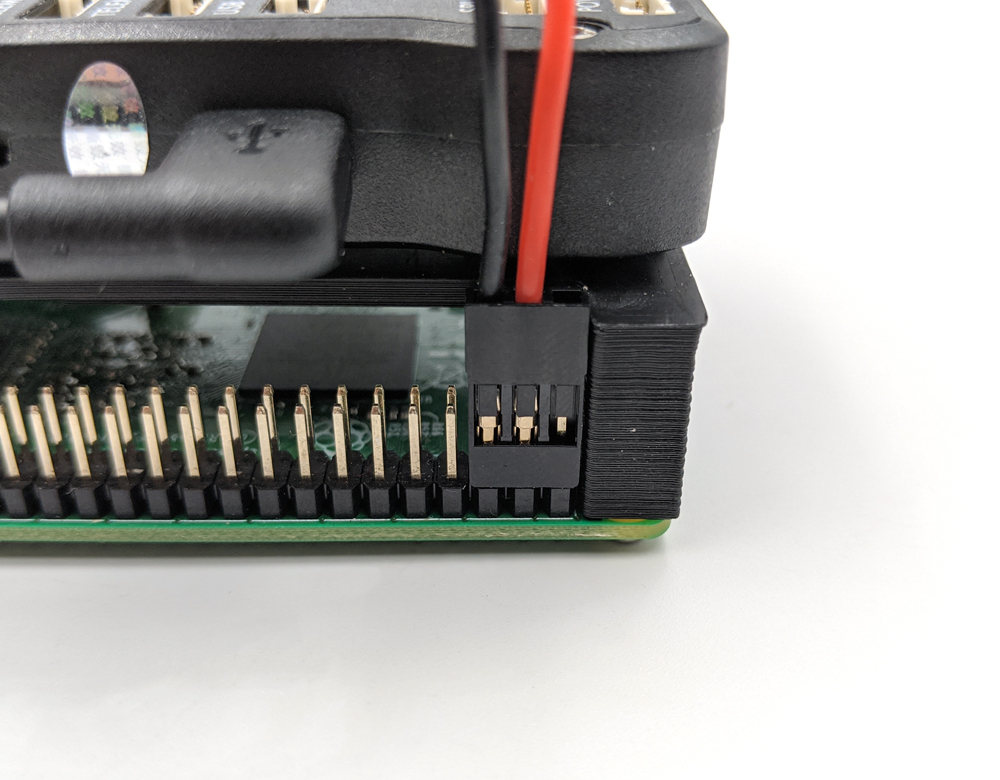
続いて、もう一方のサーボコネクタを、Pixhawkの "SBUS"("SB")チャンネルに、アース線が上になるように接続します。
ポイント
Pixhawkサーボレールから直接給電されるサーボを使用する場合のみ、Pixhawkサーボレールに電源が必要です。
注意ポイント
Pixhawkのサーボレールに複数の電源入力を接続しないでください。バッテリーエリミネーター回路(BEC)付きのESC を使用する場合は、ESC のうち 1 つだけに 5V ラインを接続し、残りは取り外すかクリップします。
Fathom-X 電源
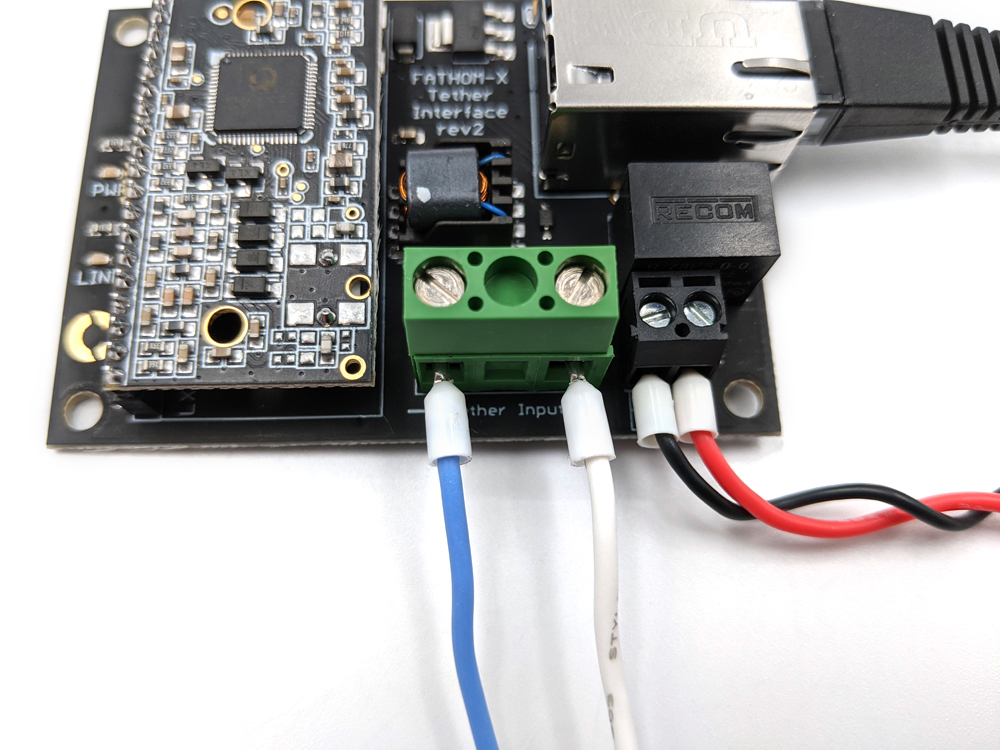
フェルールからスペード・ケーブルを取り出し、スペード・コネクターと配電線を接続しましょう。

赤線のフェルールを Fathom-X の「BATT+」に、黒線のフェルールを「BATT-」に挿入します。
その後、小さなマイナスドライバーを使ってコネクターを締めてください。
テザー
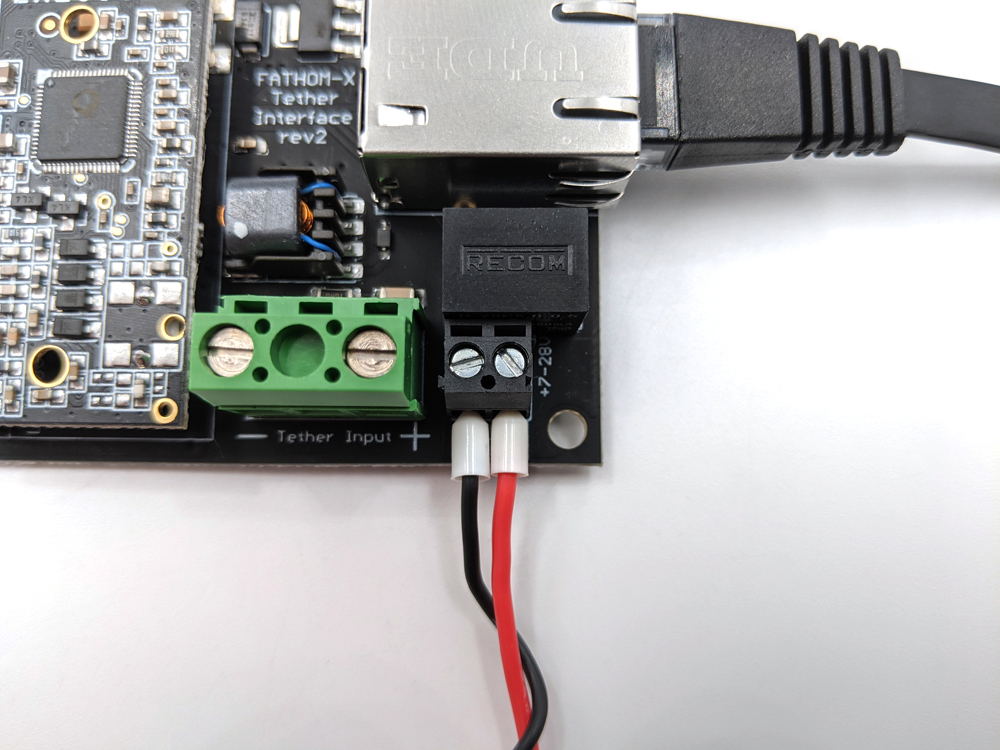
Fathom-X テザー・インターフェイス・ボードには、車両のテレメトリーとビデオ・ストリーミング用に2本のワイヤーが必要です。
まず、1本のワイヤーを「Tether Input +」に、もう1本を「Tether Input -」に接続してください。
コネクタを小さなマイナスドライバーで締めておきましょう。
これで、車両に取り付けたアドバンスドROVエレクトロニクスコンポーネントの接続はすべて完了です。
次のセクションでは、トップサイドのセットアップについて説明します。
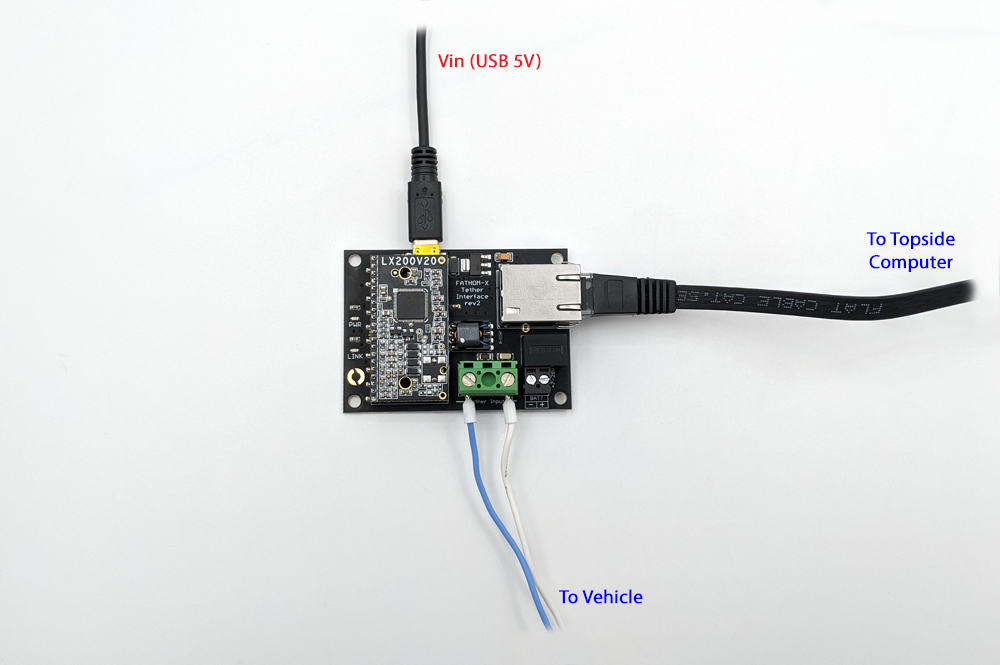
トップサイドの接続方法
もう一方のFathom-X テザー・インターフェイス・ボードは、テザーのもう一方の端で使用され、トップサイドコンピュータに接続されます。
2本のテザーワイヤーのもう一方の端をトップサイドのFathom-Xテザー入力に接続しましょう。
テザー入力線は「+」を「+」に、「-」を「-」に接続してください。

ミニUSBケーブル(別売)を使ってトップサイドのFathom-Xボードに5V電源を供給することができます。
ミニUSBケーブルをFathom-Xに接続し、もう一方はコンピューターまたは5V電源に接続しましょう。
イーサネットケーブル(別売)を使用して、Fathom-X をトップサイドコンピュータのイーサネットポートに接続します。
利用可能なイーサネットポートのないノートパソコンやコンピュータの場合は、イーサネット - USBアダプタを使用可能です。
次のステップ
ArduSubのドキュメントの指示に従って、ソフトウェアのセットアップとネットワーク設定を行ってください。






{kind=link}