

ROVは何の略称?
ROVとは遠隔操作の水中車両のことを言い、一般的には水中ドローンまたは水中ロボットと呼ばれています。
ROVは オペレーターまたは操縦士が地上にいながら、海底世界を探索することを可能としました。
通常、潜水士が海中100メートル以上潜ることはめったにありません。
また潜水艦を利用することも高価なためまれです。
つまり ROVなしでは人類が海中で作業する範囲は非常に限られていることになります。
ROVの歴史
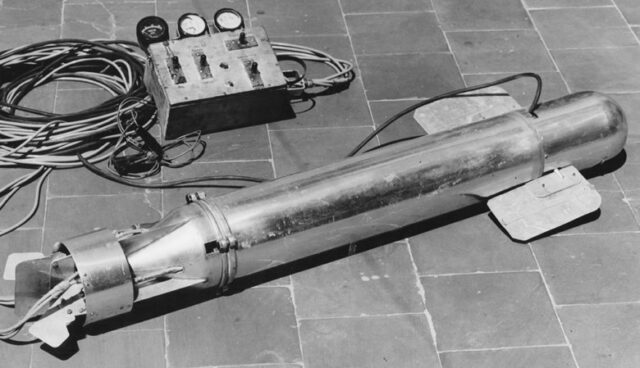
初めて構築されたROVはプードルと呼ばれ、フランス人のディミトリ・レビコフによって1953年に製造されました。
レビコフ氏は写真撮影と潜水機器のパイオニアでもあります。
プードルは、彼のダイブスクーターをテザーとサーフェイスコントロールで無人に改造したものです。
米海軍は1960年代に水中機器の回収にROVを使用し始め、以後、技術の進歩を続けています。
1980年代までに、世界中に500を超えるROVがあり、その多くは商用アプリケーションで使用されていました。
それ以来、ROVは様々な業界で一般的に利用されるようになり、世界中で何万ものROVが使用されています。
ROVシステムの構成

いくつかの主要コンポーネントを示しています。
この作業クラスROVには、他のコンポーネントもたくさんあります。
(画像クレジット:サーブシーアイ)
ROVはさまざまなニーズに対応するためにすべての形状とサイズからなりますが、一般的に共通要素がいくつかあります。
スラスター
スラスタは、車両を操縦するために使用される電気または油圧駆動のプロペラのことです。
様々な方向に移動するための複数のスラスタがあります。
カメラ
車体は水中深く移動するため、操縦士が唯一得られる視界は車載カメラを通してのみです。画像は低遅延で提供する必要があります。
ライト
ライトは水中のカメラに照明を与えてくれます。日光は水中では急速に消え、ROVが使用されるような深度では通常、完全な暗闇となります。
テザー
ほぼすべてのROVには、電力や信号を地上に運ぶテザーがあります。
これにより操縦士が車両を制御したり、カメラを見ることができます。
電波は水中を遠くまで伝わらないため、最新のワイヤレステクノロジーではROVを操作することはできません。
いつか無線操作を可能とする音響および光学モデム技術が出てくるでしょう。
フレーム
フレームは、スラスタ、カメラ、ライト、テザー、およびROVの他の部品を取り付けるための構造となります。
ほとんどのROVは、構築および変更が容易な開いた長方形のフレームで構築されていますが、一部のROVは抗力を減らし、外観を改善、または特別なミッションを実行するために高度に専門化されたフレームで構築されています。
パイロットコントロール
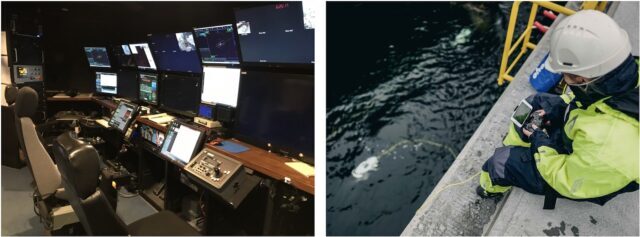
大型の科学ROVの制御室であるVentana(左)、および小型のポータブルROVのモバイル制御システムであるBlueye Pioneer(クレジット:Blueye Robotics)
表面制御は、宇宙船の制御室のようなものからスマートフォンのような単純なものまでさまざまです。
いずれの場合でも、表面制御は、操縦士が車両を制御するためのインターフェイスと、カメラビューを含む車両からの表示を提供します。
ROVにはセンサー、ロボットアーム、サンプリングデバイス、アクチュエーター、ツール、ソナーなど他にも多くの部品がありますが、ほぼすべてのROVにはこれら上記の主要部品があります。
ROVは何に使用されるのか?
ROVは人間では簡単に探索できない水中世界へのユニークなアクセスを提供します。
水中ROVを使用する方法は無数にありますが、ROVが使用される最も一般的なアプリケーションのいくつかを次に紹介します。
探査と科学における
世界の海は最も広大で、地球上で最もアクセスしにくいフロンティアの1つです。
平均的な海の深さは4,000 m(13,000フィート)以上で、有人または無人車両でその深さに到達する難易度を考慮すると、探査が今まであまり行われなかったのは明らかです。
ROVは沿岸の浅瀬から最大深度までの海を研究し探求するための最良のツールの1つを提供してくれます。
ウッズホール海洋研究所(WHOI)、モントレーベイ水族館(MBARI)、シュミットオーシャンインスティテュート(SOI)などの世界有数の研究機関で、生き物の撮影、測定、カタログ化、海洋環境への理解にも利用されています。

海底の探査と撮影に使用される調査船に乗っているROV(スバスティアン)
近年、これらの組織の多くは、ライブストリームを介してビデオを公開しています。
ここに私たちのお気に入りのいくつかを紹介します:
- Live from ROVSubBastian on the R/V Falkor?(Schmidt Ocean Institute)
- Live from ROVHercules on the R/V Nautilus?(Ocean Exploration Trust, Dr. Bob Ballard)
- Live from the Deep Discoverer ROVon the Okeanos Explorer?(National Oceanographic and Atmospheric Administration, NOAA)
これらのライブストリームは常時稼働しているわけではありませんが、ブラウザのお気に入りに追加する価値があると思います。
海中探索は大手の企業・機関だけに限定されているわけではありません。
BlueROV2のような小規模のROVは、学生、科学者、研究者にも手が届きやすく、海洋生物の研究、水のパラメータ測定のための機器配置、収集したサンプルをラボに持ち帰るなどの業務をを安全かつ容易に行うことを可能にしました。
さらにROVは、難破船、飛行機墜落事故、沈没した都市、廃坑、洞窟の探索など、水中のほぼどこででも使用することが出来ます。

水中の音を記録するためにハイドロフォンセンサーと一緒に配備されているBlueROV2。
(クレジット:Yogesh Girdhar、WHOI)
STEM教育および学術研究におけるROV

水中ロボット競技の学生チーム(およびそのROV)
ROVは、STEM教育やROVコンテスト、教室用ROVキット、およびロボットプログラムを通じての学術研究アプリケーションで人気になっています。
ROVの構築と運用は、物理学、科学、工学、プログラミング、海洋学、生物学の要素を独自に組み合わせたものになります。
ROVキットとSeaPerchのようなカリキュラムは、教室での貴重な学習体験となるでしょう。
高校生や大学生には、ROVの設計、構築、競争に挑む水中ロボット競技が多数あります。
以下は、最も人気のある水中ロボット競技の一部です。
- MATE ROVCompetition, 800以上のチーム、6,000人の学生、および36の世界各地の地域コンテストで構成されるメイトROVコンテスト
- SeaPerch Challenge,AUVSIと米国海軍スポンサーによるするSeaPerchチャレンジ
- RoboNation RoboSub Competition高度な自律型ロボット工学に焦点を当てたコンテスト
- Singapore AUV Challenge (SAUVC),高度な自律型ロボット工学に焦点を当てたコンテスト
- European Robotics League, 航空ロボット、水中ロボットを含む欧州ロボットリーグ
ROVは大学レベルの海洋生物学、海洋学、自律システム開発の研究で一般的に使用されています。
ROVのテクノロジーとアプリケーションを進歩させ、それらを自律型水中ロボット(AUVS)に変えることで、より新しい良い方法で海洋を探索し、研究することができるはずです。
水中検査におけるROV

ROVの最も一般的な商用アプリケーションは、水中検査および水中での作業です。
大型のROVは沖合の石油・ガス産業などでの困難なタスクに使用されることが多く、小型のROVは水産養殖、インフラストラクチャー・水槽検査、船体検査、パイプ検査、廃水処理検査などの幅広い業界で使用されます。
ロボット工学を使用することで危険であったり長時間を要するような仕事をはるかに速く、安全で、きれいに行うことが出来ます!

定期検査中のROVによる船のプロペラの眺め。
(クレジット:Libre Mare)
捜索救助と港湾保安におけるROV
ROVは行方不明者、ボート、自動車、その他の沈没した物体を見つけるための捜索救助任務用に警察や消防によく使用されます。
ロボットグリッパーと組み合わせて、災害や犠牲者発見などの場合に使用することができます。

ROVは軍や港湾の保安部門によっても水中インフラの検査、密輸品、爆発装置、水没した証拠品の調査などに使用されています。
ROVを使うことで人間のダイバーを危険にさらすことなく、これらの業務を実行することを可能としました。
上記はROVが使用されるほんの一部ですが、もっと多くの事例があります。
さらに探索されたい場合は、いくつかのお気に入りのリンクをここに紹介します。
- capture invasive lionfishカリブ海でミノカサゴを捕獲するために使用されたROV
- film divers and take “underwater selfies” 「水中での自撮り写真」を撮るのに使用されたROV
- NASA to someday explore underwater on other planets 他の惑星の水中を探査するためにNASAが使用したROV

ダイバーを追いかけて撮影する水中ビークル。
(クレジット:iBubble、Anais Dominici
こちらの記事はblueroboticsの記事を翻訳したものです
https://bluerobotics.com/learn/what-is-an-rov/
-
-
水中ドローンとUSV(水上ドローン)の開発・修理・販売|全国対応の株式会社チック
水中ドローンとUSV(水上ドローン)の専門店。修理・開発・販売を全国対応で提供。最新モデルや豊富な実績、専門知識で調査や業務を全力サポートします。
続きを見る
の開発・修理・販売|全国対応の株式会社チック")
-
-
水中ドローンオンラインマニュアル
ROV-FUNのマニュアルページでは、水中ドローンのセットアップ、操作方法、トラブルシューティング、メンテナンスなどを詳しく解説。初心者から上級者まで役立つ情報を提供し、安心してドローンを活用できるガ ...
続きを見る

-
-
水中ドローンBlueROV2の専門的な「修理」と「定期メンテナンス」 - 水中ドローンとUSV(水上ドローン)の開発・修理・販売|全国対応の株式会社チック
当社は、ブルーロボディックス社の正規代理店として、BlueROV2の販売、修理、そして定期メンテナンスを提供しており、水中調査などの業務でこの優れた機器をサポートしています。 我々はBlueROV2を
続きを見る
の開発・修理・販売|全国対応の株式会社チック")






{kind=link}