

海中RGB LEDインジケーターは、水中エンクロージャーやその他の機器にステータスライトを追加するのに最適なソリューションです。
このインジケーターは WS2812B LEDを使用しており、ほとんどの既存のWS2812B用ソフトウェアライブラリと互換性があります。
このガイドでは、海中 RGB LEDインジケーターの取付方法と使用方法、また BlueROV2への取付方法にについても詳しく説明します。

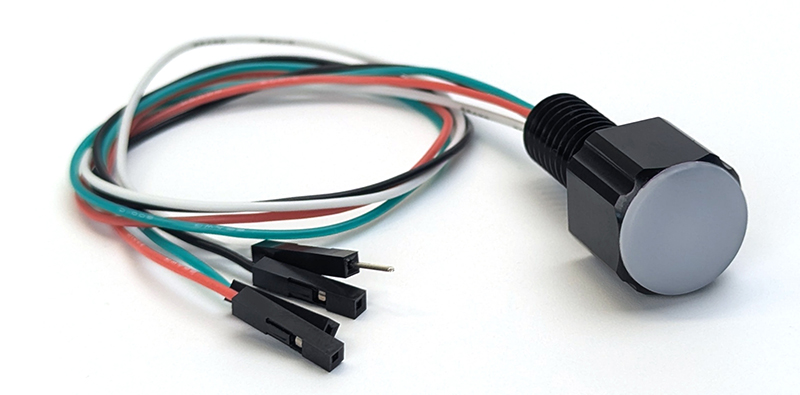
海中RGB LEDインジケータ
5V入力、マルチカラーLEDは数百万色を生成します
インジケーターの取り付け
インジケーターは、M10バルクヘッド貫通型のフォームファクターを採用しています。
注意ポイント
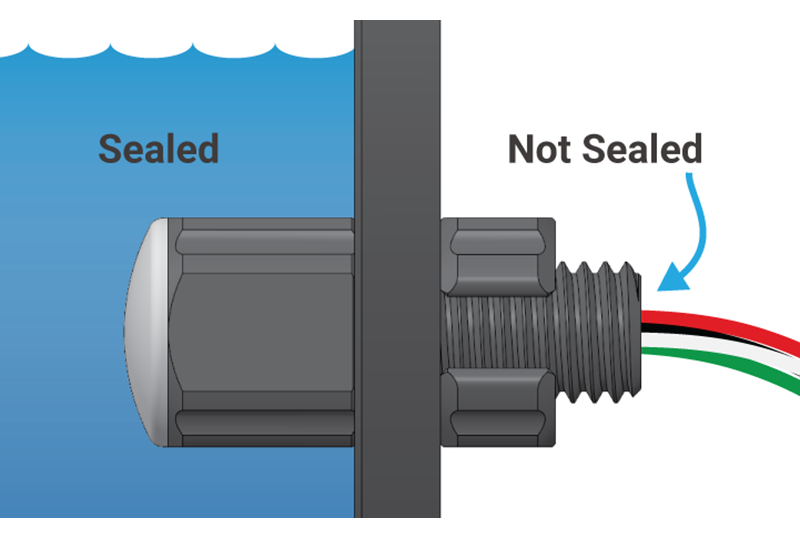
隔壁を通して設置されたインジケータ
上の図に示されているように、上部のレンズ部分のみが密閉されており、水中での使用を前提に設計されています。
一方、配線が出ている側(背面側)は密閉されていない為、水にさらされると内部に浸水してしまいます。取り付けの際は、この部分が水に触れないよう注意してください。
取り付け方法
インジケーターは、防水エンクロージャのエンドキャップや、防水ボックスのM10サイズの穴に取り付けることができます。取り付け面が適切であれば、カスタムハードウェアにも問題なく設置可能です。
取り付け要件
- M10の取り付け穴
- 滑らかで平らな表面:バルクヘッドOリングがしっかりと水密シールを形成するために必要です。
穴の加工方法
インジケーター用のM10穴は、以下の2通りの方法で加工できます。
- ネジなし穴(クリアランスホール):直径10.0〜10.2mmの穴を開ける
- ネジあり穴(タップ穴):直径8.5mmの穴を開け、M10x1.5のタップでネジを切る
取り付け手順
- Oリングの確認
取り付け前に、付属のバルクヘッドOリングに汚れや傷、劣化がないか確認します。 - Oリングの装着
Oリングに薄くシリコングリスを塗り、バルクヘッドの下部にある溝にしっかりとセットします。

【A】ネジなし穴に取り付ける場合
- バルクヘッドを穴に挿入し、反対側から付属のバルクヘッドナットを取り付けます。
- ナットをまずは手でしっかり締め、次にM10バルクヘッドレンチ(または適切な工具)を使って完全に固定します。
- 正しく取り付けられていれば、バルクヘッドはぐらつかず、手で緩めることはできません。
【B】ネジあり穴に取り付ける場合
- バルクヘッドを指の力でしっかりとねじ込みます(背面のナットは不要です)。
- M10バルクヘッドレンチ(または適切な工具)で接続を完全に固定します。
- こちらも、正しく取り付けられていれば回転せず、手で外せないようになっているはずです。
ワイヤー接続方法
インジケーターの配線は、0.1インチ(2.54mm)ピッチのヘッダーピンで終端されています。
これにより、ほとんどのマイクロコントローラーのピンやジャンパーワイヤーと簡単に接続できます。
以下に、各ピンの配線と接続方法を示します。

■ 電源ライン
- 赤(V+):3.5〜5.5 V DC に接続します
- 黒(V-):グランド(GND)に接続します
インジケーターは、シリアルデータ送信元(マイコン等)と共通のグランド基準(GND)を持っている必要があります。
■ データ入力(Data In)
- 緑(Data In):マイクロコンロトーラーのシリアルデータ出力ピンに接続します
- データ入力電圧は、V+ の ±0.5V以内である必要があります(例:V+が5Vなら、データ信号は4.5〜5.5Vの範囲内であること)
■ データ出力(Data Out)
- 白(Data Out):インジケーター同士をデイジーチェーン接続するために使用します
→ 次のインジケーターの 緑(Data In) に接続することで、1つのシリアル出力ピンから複数のインジケーターを制御可能になります - 使用しない場合:白のデータアウト線(ヘッダーピン)は露出したままにせず、付属の熱収縮チューブでしっかりと絶縁してください
コードライブラリ
このインジケーターは、WS2812B 対応のほとんどのソフトウェアライブラリと互換性があります。以下のライブラリで動作確認済みです。
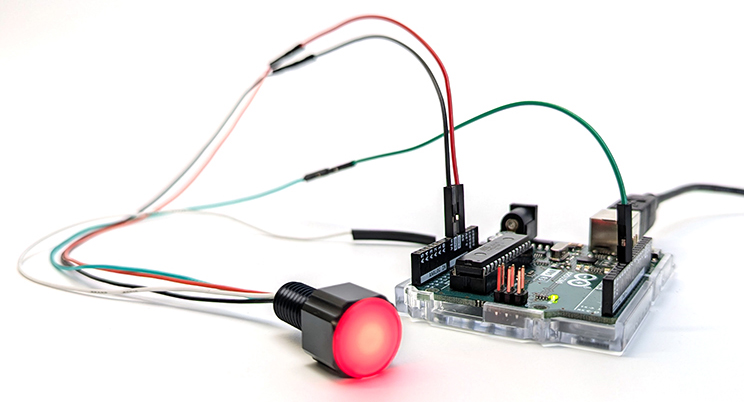
Arduino Uno の使用例
このサンプルでは、Adafruit NeoPixel ライブラリを使って 1 つのインジケーターを制御します。LEDの色を赤 → 緑 → 青へ順に変化させ、さらに虹色のサイクルエフェクトも実行します。
接続に必要なもの
- オス-オスのジャンパーワイヤー ×3本
配線手順
- ジャンパーワイヤーを使用して、インジケーターの各線を次のように Arduino Uno に接続します。
- 赤いワイヤー(V+) → Arduino の 5V ピン
- 黒いワイヤー(GND) → Arduino の GND ピン
- 緑のワイヤー(Data In) → Arduino の デジタルピン 6
白いワイヤー(Data Out)はこの例では使用しません。付属の熱収縮チューブで覆って絶縁してください。
- Arduino を USB ケーブルでコンピューターに接続します。
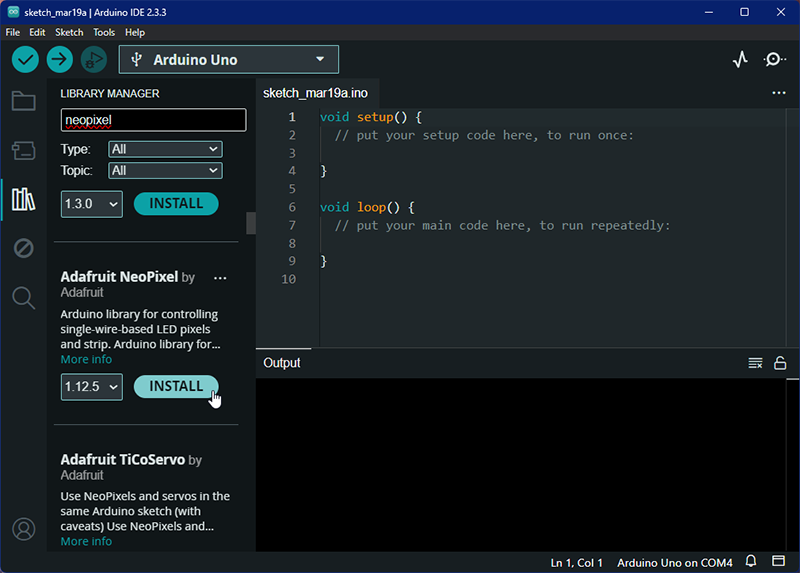
- Arduino IDE を開き、ライブラリマネージャーから「NeoPixel」で検索し、Adafruit NeoPixel ライブラリをインストールします。
- 以下のテストスケッチをダウンロードし、展開します。
RGB-INDICATOR-TEST (zip)
Arduino IDEでスケッチファイルを開くか、ファイル内のコードをコピーして新しいスケッチに貼り付けてください。 - スケッチを Arduino にアップロードすると、インジケーターが赤 → 緑 → 青 → 虹色のサイクルという順に点灯し始めます。
BlueROV2への取付ガイド
BlueROV2にアルミチューブを使っていると、Navigatorフライトコントローラーのステータスライトが外から見えなくなってしまいますよね。
あの青く点滅する光が見えないのはちょっと物足りない…。
そんなときにおすすめなのが、海中 RGB LEDインジケーターの取り付けです。
これはNavigatorとプラグアンドプレイで接続できて、簡単にあの“安心の青”を取り戻すことができます。
このガイドでは、BlueROV2に海中 RGB LEDインジケーターを取り付ける手順を、わかりやすく紹介していきます。
取り付けに必要な部品と工具
取り付けを行うには、以下の部品と工具が必要です。
海中 RGB LEDインジケーター
5V入力、マルチカラー対応で数百万色の発光が可能
- M10バルクヘッド用レンチ ×1
- 2.5mm 六角ドライバー ×1
- シリコングリース(Molykote 111)
BlueROV2の準備
まずは、BlueROV2のエレクトロニクス・エンクロージャー(電子機器筐体)を開けて、未使用のバルクヘッド貫通部(ブランクペネトレーター)を取り外す必要があります。
使用する工具
- 2.5mm 六角ドライバー ×1
- M10バルクヘッドレンチ ×1
手順に不明点がある場合は、BlueROV2操作ガイドの「BlueROV2の修理」セクションに詳細な説明がありますので、そちらも参考にしてください。
手順
- バッテリーを取り外し、BlueROV2の電源が完全にオフになっていることを確認します。
- 2.5mm六角ドライバーを使って、電子エンクロージャを固定しているM3x16取り付けネジを外し、PRV(圧力開放バルブ)または通気プラグも取り外します。その後、電子エンクロージャアセンブリから電子筐体チューブを取り外します。
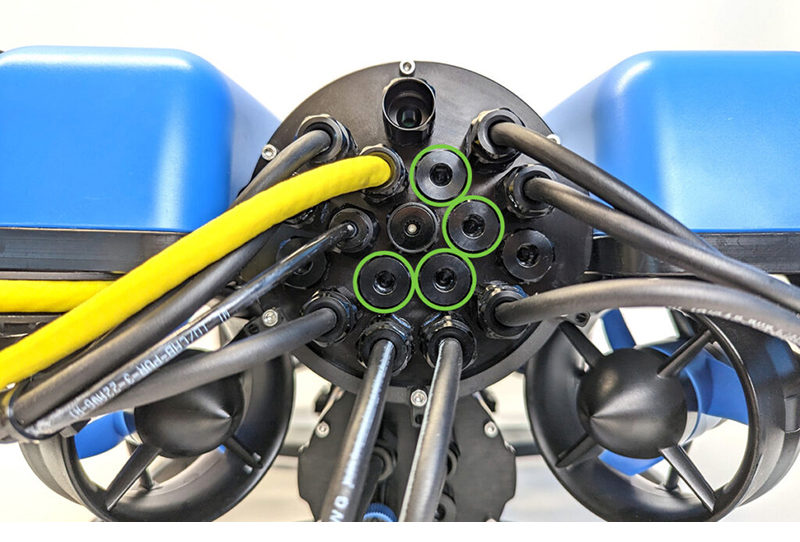
- エンドキャップにある未使用のペネトレーターのうち1つを選び、M10バルクヘッドレンチを使って取り外します。
BlueROV2へのインジケータの取付手順
取付に必要なもの
- イージケーター
- M10バルクヘッドナット ×1(インジケーターに付属)
- -013 Oリング ×1(インジケーターに付属)
- 30mm 熱収縮チューブ ×1(インジケーターに付属)
- M10バルクヘッドレンチ ×1
- シリコーングリース(モリコート111)
- バルクヘッドを取り外した穴の周囲にあるエンドキャップの外側を拭いてください。Oリングの取り付け部が清潔で、ほこりやゴミが付着していないことを確認します。
- 取り付け前に、付属のバルクヘッド用Oリングに汚れや損傷がないかをチェックしてください。
- Oリングにシリコングリースを薄く塗り、バルクヘッド下部の溝に丁寧にはめ込みます。

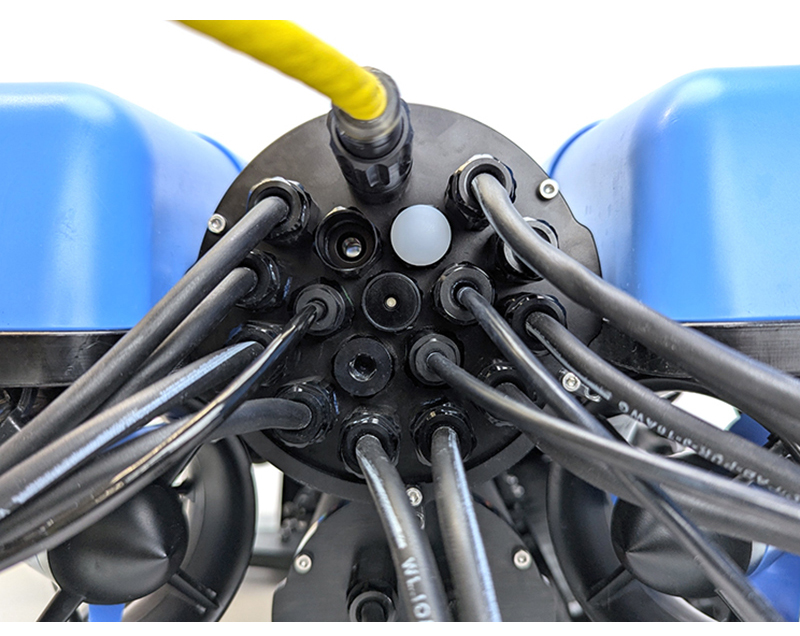
- バルクヘッドを穴に挿入し、反対側からバルクヘッドナットを取り付けて締めます。ナットはまず指で締められるところまで締め、その後バルクヘッドレンチを使ってしっかり固定してください。
ポイント
正しく取り付けられていれば、バルクヘッドは回転せず、手で簡単に緩むことはありません。
ワイヤーの接続と再組み立て
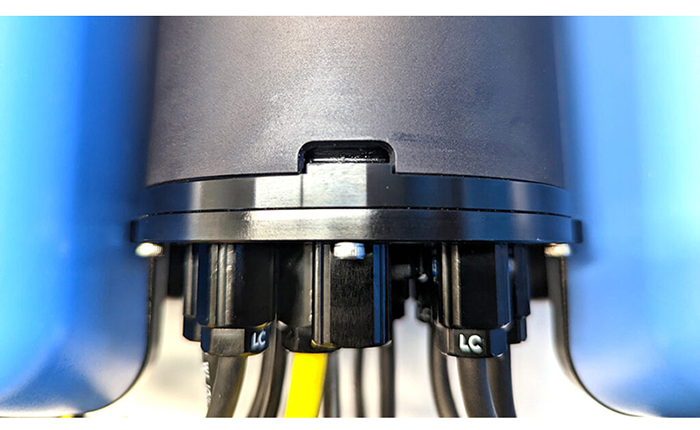
- 黒・赤・緑のインジケーターワイヤーを、NavigatorのRGBヘッダーに接続します。
左から順に、黒 → 赤 → 緑 の順番で差し込みます。
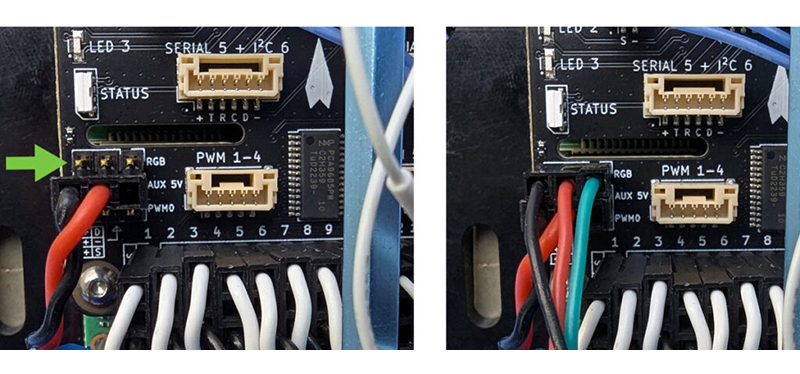
- 白いインジケーターワイヤーは使用しません。付属の熱収縮チューブを使って、白いワイヤーのむき出しのピン部分を覆い、安全かつ邪魔にならないよう収納してください。
- 接続が完了したら、BlueROV2の組み立て作業に進みます。
Oリングフランジとチューブの内側端にある2つのラジアルOリングに、シリコングリースを薄く塗布してください。 - チューブとドームアセンブリをフランジに取り付け直します。
ROVにロック式エンクロージャーが付いている場合は、回転ロックタブがチューブのスロットにしっかり収まっているかを確認してください。
- ROVにロックコードがある場合は、それをスロットに通します。
- PRVまたはベントプラグをバルクヘッドに再び取り付けます。プラグを時計回りに回して止まるまでしっかり締め、密閉状態にします。
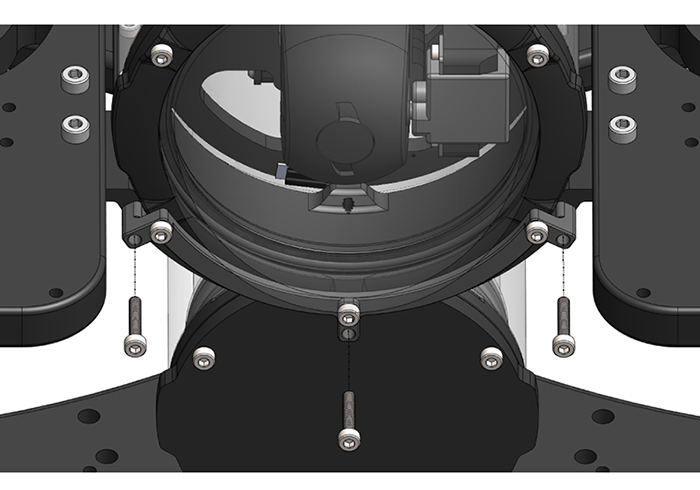
- 電子エンクロージャーを本体のクレードルにセットし、取り付けクリップをクレードルのネジ穴に合わせます。
2.5mmの六角レンチを使って、フロントとリアのエンクロージャークレードルにネジで固定します。
ココがポイント
BlueROV2の電源を入れると、インジケータがNavigatorのステータスライトと連動して点灯します。
フィードバックのお願い
このガイドに関して「もっとこうした方がいい」と感じた点や、改善のアイデアがありましたら、ぜひお気軽にお知らせください。





{kind=link}