

はじめに
DeepWater Exploration(DWE)社の exploreHD は、水深400mに対応したUSBカメラです。
BlueROV2 に簡単に接続でき、追加のライブ映像ストリームを提供します。

ディープウォーター探検 exploreHD USBカメラ
1080p外付けUSBカメラ、深さ400メートル対応
本ガイドでは、exploreHD を BlueROV2 に取り付ける手順を説明します。
取り付けに必要な部品と工具
DWE exploreHD カメラ本体のほか、以下の部品・工具が必要です。
必要な部品・工具
- M10 バルクヘッドレンチ ×1
- 2.5 mm 六角ドライバー ×1
- #1 プラスドライバー ×1
- シリコーングリース(Molykote 111)
- ケーブル管理用 結束バンド(ケーブルタイ)
追加ハードウェアについて
exploreHD には、ブラケットをROVに固定するためのハードウェアは含まれていません。
必要な締結部品や工具は、取り付け位置や方法によって異なります。
取り付けオプションおよび推奨ハードウェアについては、本ガイド後半の「DWE exploreHD の取り付け」セクションを参照してください。
ハードウェアの取り付け
カメラを取り付けるには、BlueROV2 の電子機器エンクロージャーを開き、バルクヘッド貫通部品(ペネトレーター)を取り外す必要があります。
必要な工具
- 2.5 mm 六角ドライバー ×1
- M10 バルクヘッドレンチ ×1
※ 手順が不明な場合は、BlueROV2 操作ガイドの
「BlueROV2 のメンテナンス」セクションを参照してください。
手順
- バッテリーを取り外し、BlueROV2 の電源が完全にオフになっていることを確認します。
- 2.5 mm 六角ドライバーを使用し、エンクロージャー固定クリップをクレードルに固定しているM3×16 取り付けネジを外します。
次に、PRV(圧力調整弁)またはベントプラグを取り外し、電子機器エンクロージャーチューブをエンクロージャーアセンブリから取り外します。
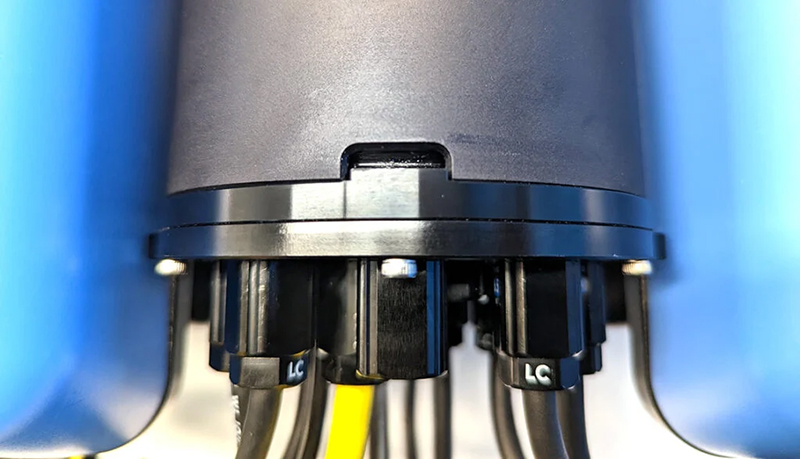
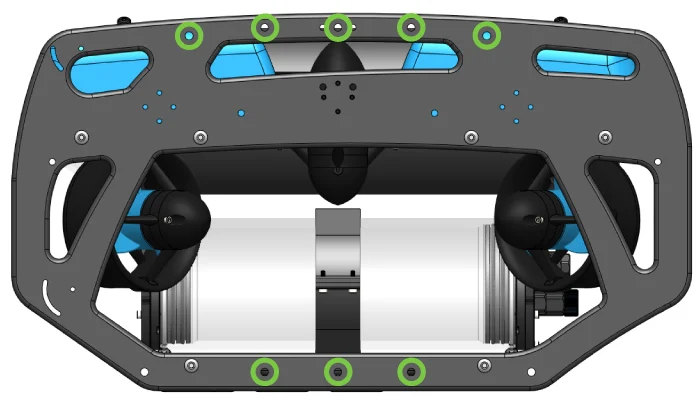
- エンドキャップ中央にある ブランク(未使用)ペネトレーターを 1 つ選び、M10 バルクヘッドレンチで取り外します。
複数のカメラを取り付ける場合は、カメラ 1 台につき 1 つずつ取り外してください。
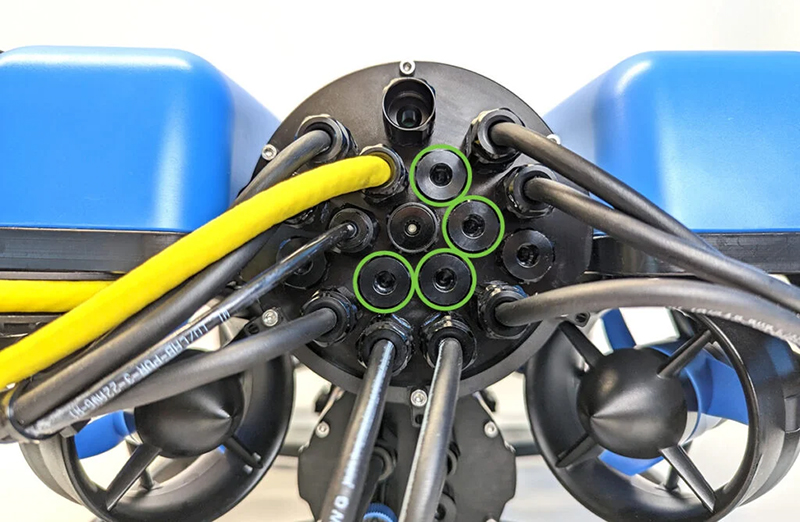
バルクヘッドペネトレーターの取り付け
カメラ用バルクヘッドペネトレーターをエンドキャップに取り付けます。
必要な部品・工具
- exploreHD カメラ本体
- M10 バルクヘッドナット ×1(カメラ付属)
- -013 Oリング ×1(カメラ付属)
- M10 バルクヘッドレンチ ×1
- シリコーングリース(Molykote 111)
手順
- 穴の周囲を清掃し、ほこりや異物が付着していないことを確認します。
- Oリングに汚れや損傷がないか点検します。
- Oリングにシリコーングリースを薄く塗布し、
バルクヘッドペネトレーター下側の溝に取り付けます。

- バルクヘッドを穴に挿入し、反対側からナットを取り付けます。まず手で締められるところまで締め、その後バルクヘッドレンチでしっかり固定します。
正しく取り付けられていれば、バルクヘッドは回転せず、手で緩めることはできません。
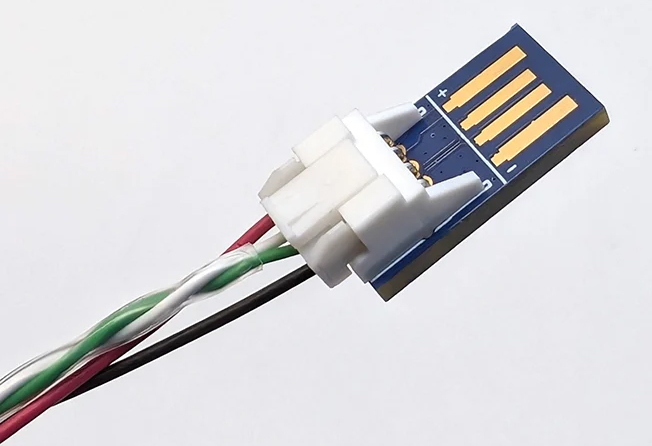
配線接続と再組み立て
必要なモノ
- JST–USB-A 変換アダプター ×1(カメラ付属)
手順
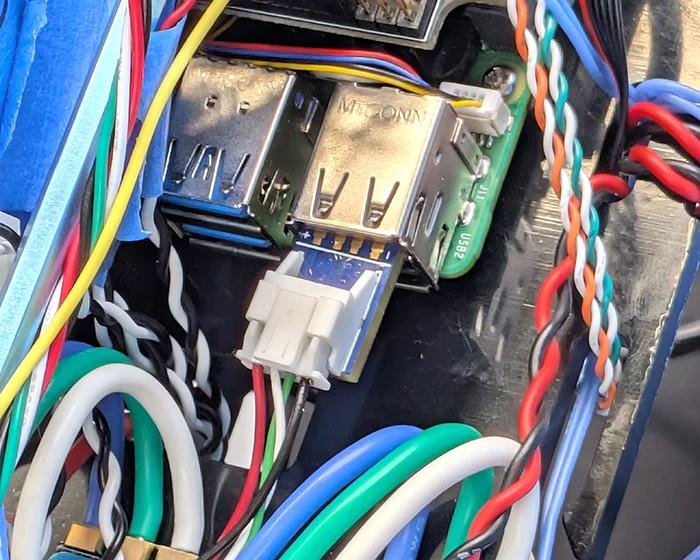
- カメラケーブルの JSTコネクターに変換アダプターを接続します。
- アダプター付きケーブルを Raspberry Pi のUSBポートに接続します。
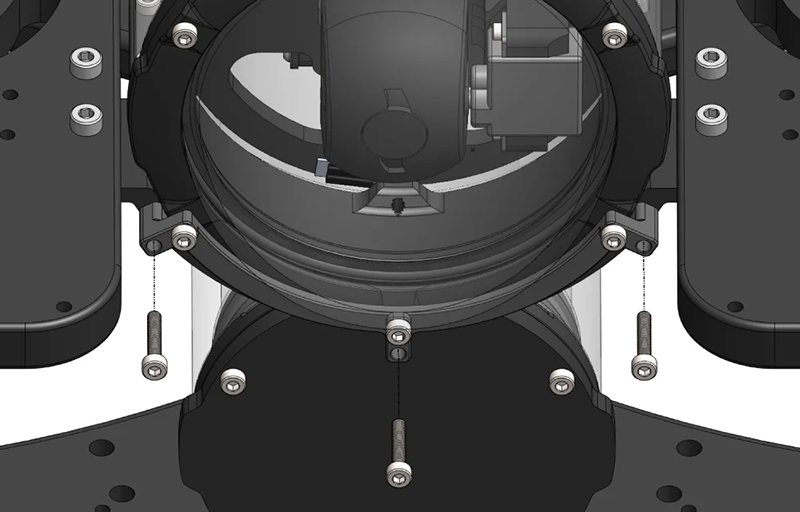
- 電子機器エンクロージャーを閉じ、チューブとドームアセンブリを再取り付けします。ロック式の場合は、ロックタブが正しく収まっていることを確認してください。
- ロックコードがある場合は、スロットに通します。
- PRVまたはベントプラグを再取り付けし、時計回りに止まるまで締めて密封します。
- 電子機器エンクロージャーをクレードルに戻し、取り付けクリップを合わせて、2.5 mm 六角ドライバーで前後のネジを固定します。
※ ペネトレーターの取り付け・取り外し後は、必ず真空テストの実施を推奨します。 真空テストの手順は BlueROV2 ガイドを参照してください。
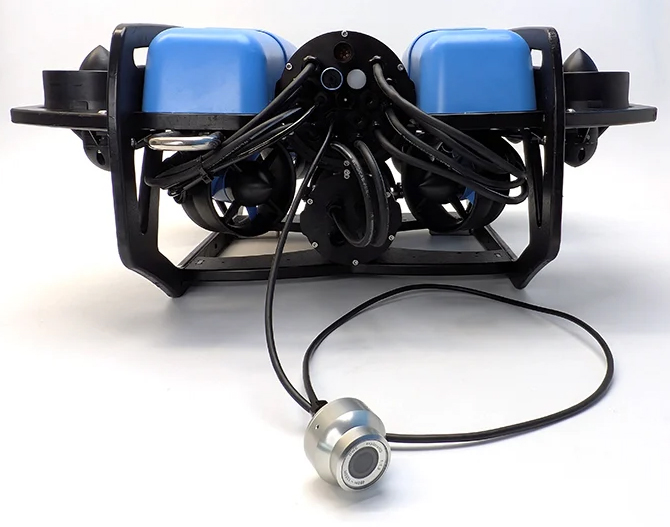
DWE exploreHD の取り付け
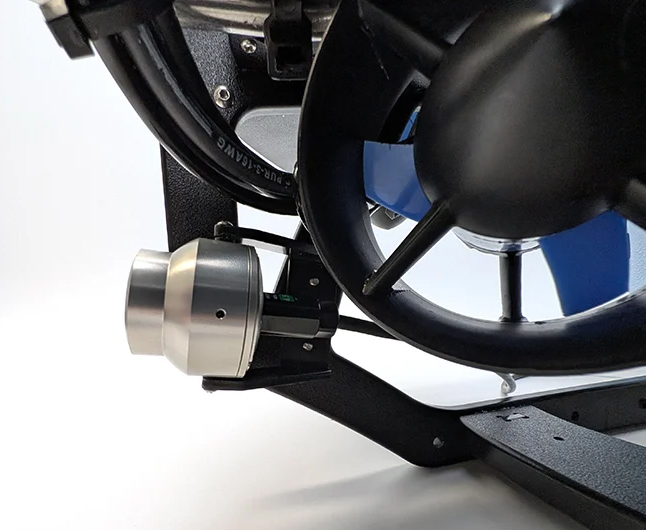
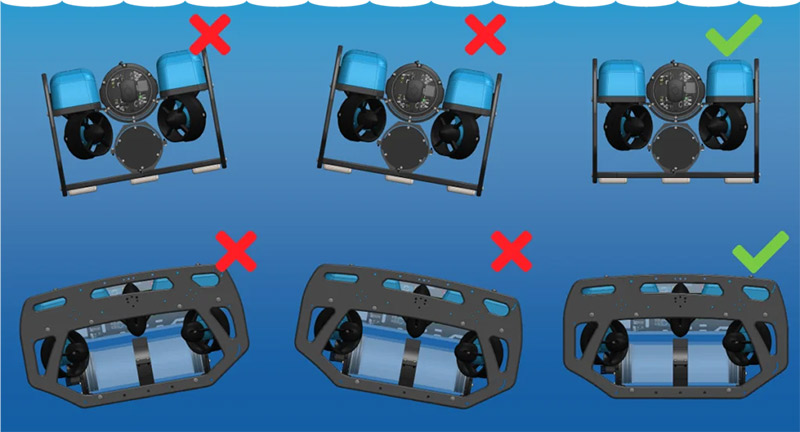
exploreHD は非常にコンパクトなため、柔軟に取り付け位置を選択できます。
スラスタや他の機器の動作を妨げる位置への設置は避けてください。
付属ブラケットには、以下の 2 種類の取り付け方法があります。
M3 ネジ穴を使用する方法
- ブラケットの小穴は M3×0.5 ネジ用です。
- ブラケットをテンプレートとしてフレームに穴位置をマーキングします(通常は 2 か所で十分)
- 約 3.3 mm(1/8 インチ)のドリルで穴を開けます。
- M3×0.5×16 mm ネジでブラケットを固定します。
大型クリアランス穴を使用する方法
- ラケット中央の大型穴はM6 または #12 サイズに対応しています。
- 約 6.3 mm(1/4 インチ)の穴を開けます。
- M6 または #12 のナット・ボルトで固定します。
- BlueROV2 サイドパネルの既存穴を使用し、M6×12 mm ネジでプラスチックフレームに直接固定することも可能です(穴あけ不要)。
カメラの固定
取り付け場所を決め 適切な穴を開けたら、カメラをブラケットに取り付けることができます。
手順
- 付属のプラスチックワッシャーを、ブラケットとカメラの間に挟みます。
- #1 プラスドライバーと M2×6 ネジ 2 本を使用してカメラを固定します。
- カメラ前面の「exploreHD」ロゴが、カメラの上面を示します。

ケーブル管理
ケーブルは結束バンドでフレームに固定し、引っかかりやスラスタープロペラへの接触が起きないようにしてください。
固定後は、ケーブルがプロペラの可動範囲に入っていないことを必ず確認します。

フレーム上のバラスト調整
必要に応じて「バラスト調整」セクションを参照し、中性浮力とバランスを調整してください。
ソフトウェア設定
BlueOS は exploreHD のビデオストリームを自動処理するため、
特別な設定はほとんど不要です。
基本設定
- BlueROV2 の電源を入れ、コンピューターに接続します。詳しい方法はBlueROV2ソフトウェアセットアップガイドでご確認いただけます。
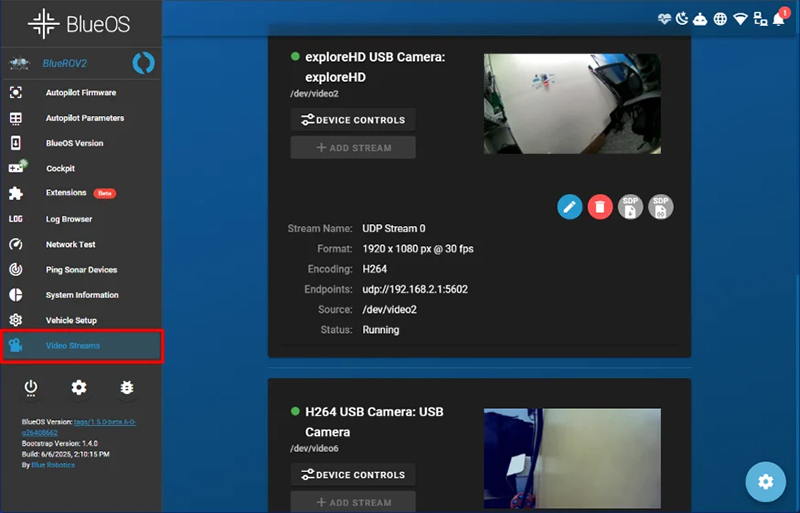
- ウェブブラウザで 192.168.2.2 または blueos.local にアクセスし、BlueOS を起動します。
- 左サイドバーの「ビデオストリーム」をクリックすると、接続されている exploreHD カメラが表示されます。これで Cockpit や QGroundControl で映像を確認できます。
トラブルシューティング
- BlueOS が最新であることを確認してください。
- BlueOS を再起動してください。
- ビデオストリーム設定をリセットしてください。
QGroundControl での追加カメラ表示
QGroundControl は複数カメラの同時表示には対応していませんが、表示するカメラストリームを切り替えることができます。
手順
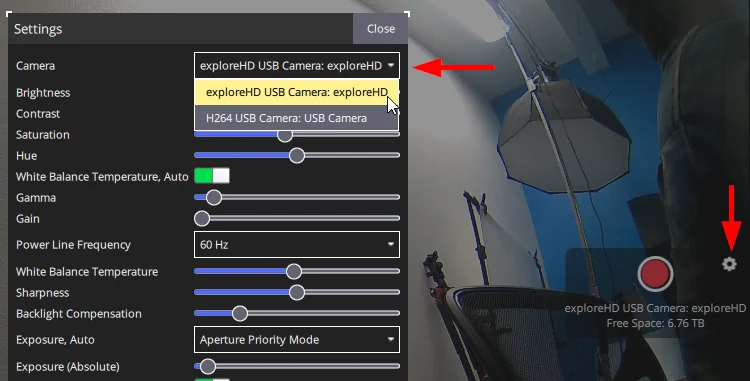
- ビデオ録画ツール横の歯車アイコンをクリックします。
- ビデオ設定画面で、表示したいカメラを選択します。
ストリームが表示されない場合
BlueOS のビデオストリームの ポート番号を偶数(例:5601 → 5602)に変更してください。
Cockpit での追加カメラ表示
Cockpit ではレイアウトを自由にカスタマイズできます。
インターフェースにもう一つのカメラビューを追加する方法は以下の通りです。
手順
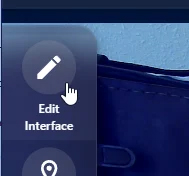
- メインメニューから「インターフェース編集」を選択します。
- レイアウトエディタで「ビデオプレイヤー」ウィジェットを追加します。(ウィジェットをディスプレイエリアにドラッグ&ドロップ)
レイアウトに合わせて動画ウィジェットを自由に動かしたりサイズを変えたりできます。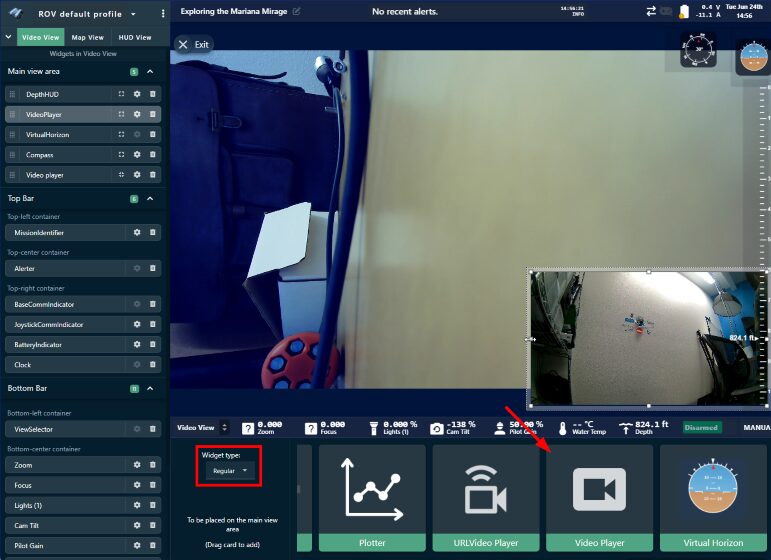
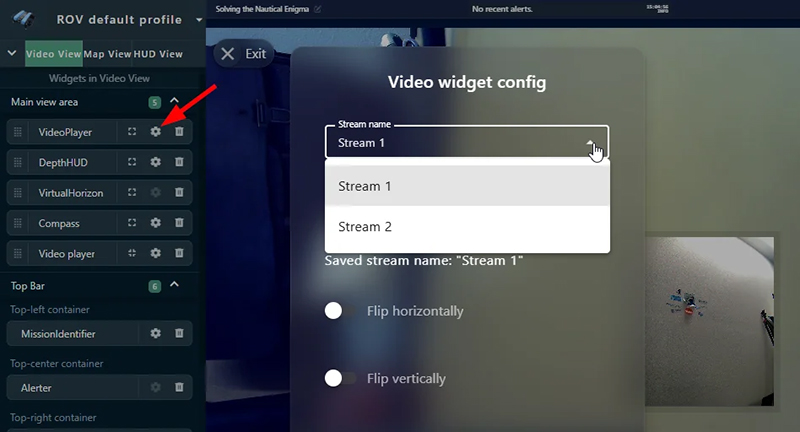
- ウィジェットの歯車アイコンから表示するカメラを選択します。
ビットレートと詳細設定
複数の高帯域幅デバイスを使用している場合、カメラのビットレートを下げることで通信の安定性を向上させることができます。
手順
- BlueOS v1.1.0 以上が必要です。BlueOSアップデート方法
- 「拡張機能」メニューからDeepWaterExplorationのDWE OS 拡張機能をインストールします。
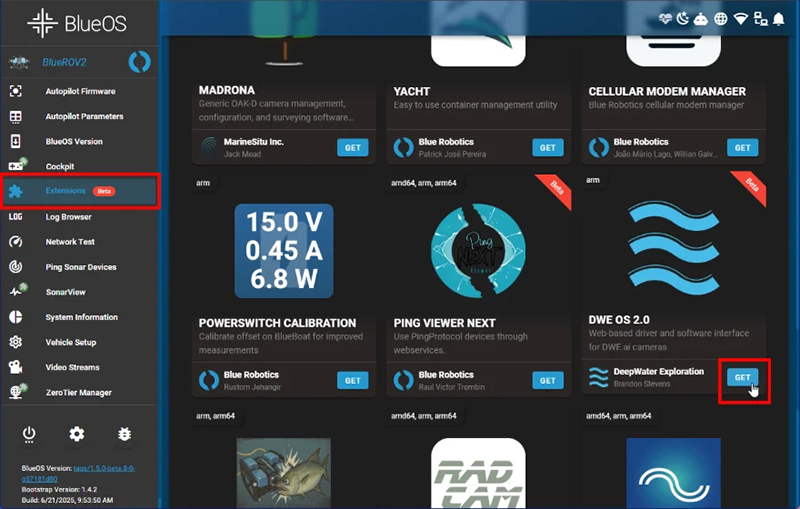
- 拡張機能を起動し「カメラコントロール」からビットレートを調整します。
ポイント
- ビットレートを下げる:安定性向上(画質低下)
- ビットレートを上げる:高画質(帯域消費増加)
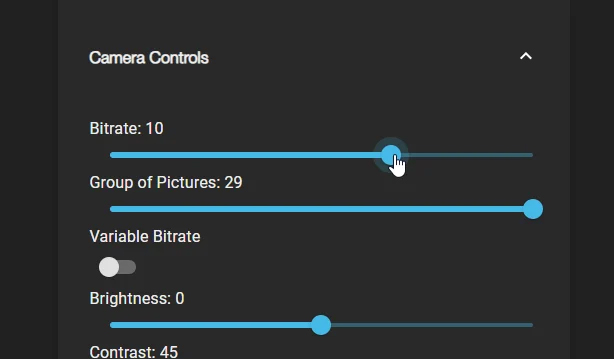 ご自身の運用環境に最適なバランスを見つけてください。
ご自身の運用環境に最適なバランスを見つけてください。
DWE OS 拡張機能では、各カメラごとの詳細設定も可能です。





社の exploreHD は、水深400mに対応したUSBカメラです。 BlueROV2 に簡単に接続でき、追加のライブ映像ストリームを提){kind=link}