







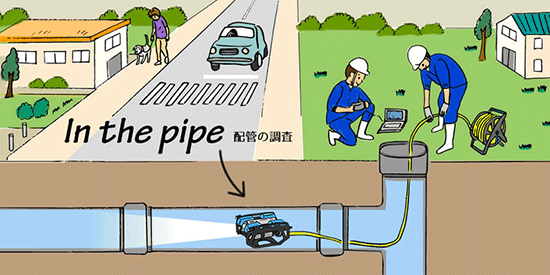
株式会社チックの詳細資料を今すぐ入手!
高性能水中ドローン『BlueROV2』や『BlueBoat』の特徴や導入事例を詳しくご紹介。プロ向けの機体で、水中探査や研究に最適です。詳細なスペックやカスタマイズオプションを含む無料資料をお届けします!

こんな方におすすめ
- 業務で使える水中ドローンを探している
- BlueROV2の価格を知りたい
- BlueBoatの詳細を知りたい
- 弊社のサポートなど詳しく知りたい
ASV(小型無人ボート)の販売

産業用水中ドローンBlueROV2の販売

ポイント
弊社はBlueROV2のメーカーBlue Roboticsの販売店です。水中ドローンBlueROV2については2017年から使用しているヘビーユーザーでもあります。
これまでの経験をもとにBlueROV2をもっと国内に広めるため販売及び運用のサポートをしています。これまで弊社が販売した仕様でニーズの高かった順に解説しています。
弊社は、水中ドローンBlueROV2専門として、各種調査から機体販売、カスタマイズ、メンテナンスまでトータルで提供しています。
水中ドローンのカスタマイズ

業務に合わせた仕様にBlueROV2をカスタマイズします。これまでに複数のカメラ、音響カメラ、フォトグラメトリ用など特定の業務に特化したカスタマイズに対応しています。
事務所敷地内に専用のプールを設置し、すぐに水中実験ができる環境があり試行錯誤がスピーディーに進みます。
その他、無人ボートの開発にも力を入れています。
水中調査の請負

現在、さまざまなROVが販売されていますが、弊社ではアメリカBlue Robotics社のBlueROV2をメインに使用しています。従来の水中調査方法よりも低コスト、安全性の向上、調査結果の正確さなどが高いことが特徴です。
これまで人が確認できなかった部分の調査も可能なため、新しい分野での活躍が見込めます。
ドローンに比べるとまだ発展途上な分野ですが少しずつ認知度も上がり漁業、インフラ、土木関係から水中調査の依頼が増えています。
水中ドローンBlueROV2部品の購入

BlueROV2関連のパーツが揃います。お気軽にご相談ください。
BlueROV2 をご購入のお客様には、ニーズに合わせたカスタマイズをご提案させていただきます。




BlueROV2アフターサービス
弊社では2017年からBlueROV2をユーザーとして使用し数多くの水中調査の現場を経験しその後、Blue Roboticsの販売店として活動しています。内部構造を熟知し、修理やカスタマイズの対応も可能です。
弊社で機体を導入した方には下記のサポートがります。
- 特別価格にて基礎が受けられます
- 1年目のメンテナンスが無料
- 修理時の部品代が特別価格
- テザーケーブルのレンタル
- 予備機レンタルを特別価格
- 修理時の代替え機特別価格
BlueROV2専用オンラインマニュアル

水中ドローンBlueROV2レンタル
産業用水中ドローンBlueROV2をレンタルします。
BlueROV2の本体からテザーケーブルのみ、予備バッテリーのみの単体レンタルも可能です。
機体導入後にも予備機としてレンタルするお客様がいます。BlueROV2の操縦には熟知しているが予備機まで用意するのはちょっとという方に最適です。
短期プランから1カ月の長期プランまでご用意しています。

こんな方におすすめ
- 予備機の用意が必要な場合
- 複数台体制の業務
- 導入前に機体を確認したい方
BlueROV2の操縦及びメンテナンス講習
水中の点検や調査で使われる水中ドローンBlueROV2の構造から操縦訓練、メンテナンスまでトータルで訓練をします。
水中の業務は空を飛ぶドローンと違い、機体の姿は見えないし、水も濁りがあり思い通りに操縦はできません。
弊社では、機体の性能を存分に発揮するために必要な訓練を提供しています。

こんな方におすすめ
- 操縦を熟知して機体性能を発揮したい方
- 社内でオペレーションチームを構築する企業
- 導入後に自社でメンテナンスをする企業
業務ご依頼の流れ
step
1ご相談・お問い合わせ
- まずはお気軽にご相談ください。使用目的やご希望の仕様について詳しくお伺いし、最適な機材をご提案いたします。
step
2ヒアリング・打ち合わせ
- お客様のニーズを詳細にヒアリングし、具体的な要件やご希望のカスタマイズについてお打ち合わせを行います。オンラインまたは対面で対応可能です。
step
3お見積りのご提案
- ご要望に基づき、ボートのカスタマイズ内容やオプションを含めたお見積りを提示いたします。ここで、納期や予算についてもご確認いただけます。
step
4ご注文確定
- お見積り内容にご納得いただけましたら、ご注文を確定させていただきます。ご注文後、正式に製作を開始いたします。
step
5製造・カスタマイズ
- ご注文いただいた内容に基づき、専門の技術者が組み立て・カスタマイズを行います。進行状況は随時ご報告いたします。
step
6納品前テスト・調整
- 納品前に各機能のテストと最終調整を行い、万全の状態でお届けします。必要に応じて、お客様にも動作確認をしていただきます。
step
7納品・操作説明
- 完成したボートをお客様に納品いたします。納品時には、操作説明やメンテナンス方法についても詳しくご案内します。
step
8アフターサポート
- 納品後も、使用中のサポートやメンテナンス、アップグレードのご相談を受け付けております。安心して長くご使用いただけるよう、サポート体制を整えています。
水中ドローンを使った弊社の事例

弊社では2016年から水中ドローンを導入し、様々な場所の調査をしてきました。
ただし、事例で場所やその雰囲気を公開することができない場所がほとんどです。ですので、雰囲気だけ、イラストでご紹介します。
- 水中遺跡調査
- 水中捜索(海、川、湖、ダム、プール等)
- 構造物の水中調査(橋、ダム等)
- 海洋港湾構造物の調査
- 魚礁の調査
- 海洋生物調査
- 人間が立ち入るのには危険な場所の調査
水中ドローンを定期検査に用いることで効果的かつ効率的な維持管理が期待でき、点検対象(水中部の状態把握、コンクリート堤体、水平打網目開き、ゲート点検、ダム堆砂など)にあわせた撮影が可能です。
損傷具合の点検でいえば、亀裂、破損、浸食、劣化、腐食、傾き、土砂堆積などの早期発見が期待できます。

2025/5/17
Cerulean Surveyor 統合キット
はじめに この統合キットには、Surveyor 240-16 マルチビームエコーサウンダー(音響測深機)を BlueBoat に取り付けるために必要なすべての部品が含まれています。 通常、Blue Robotics 社から音響測深機を購入した場合には、このキットは同梱されていますが、こちらでも個別に購入いただけます。 なお、Surveyor マルチビーム音響測深機を BlueBoat で使用するには、イーサネットスイッチが必要です。 製品概要 この統合キットには、Cerulean Surveyor マルチ ...

2025/5/17
Cerulean Omniscan 450 FS マウントブラケット
はじめに Omniscan 450 FSイメージングソナーをBlueROV2に取り付けるために必要な工具とハードウェアがすべて含まれています。 このマウントブラケットは、Blue Roboticsでソナーを購入した場合に同梱されていますが、単品でも販売しています。なお、Omniscan 450 FSイメージングソナーをBlueROV2で使用するには、別途イーサネットスイッチが必要です。 製品説明 このマウントブラケットには、Cerulean Omniscan 450 FSイメージングソナーをBlueROV ...

2025/5/17
Cerulean Omniscan 450 FS イメージングソナー
はじめに Omniscan 450 FS は、最大120mの長距離レンジと、50度の広い垂直ビーム幅を備えた高性能イメージングソナーです。 海底のターゲットの特定やナビゲーションに最適です。 BlueROV2 に迅速に取り付けるためのブラケットと必要なハードウェアが同梱されています。 単体のソナーユニットとして使用できるほか、追加ユニットと組み合わせて、SonarView ソフトウェアを使用した 2D モーショントラッキングにも対応しています。 ※BlueROV2 での運用には、別途イーサネットスイッチが ...

2025/5/17
Cerulean Surveyor マルチビーム音響測深機
はじめに Surveyor 240-16は、BlueBoatやその他の小型USVに最適な、コンパクトでコストパフォーマンスに優れたマルチビーム音響測深機です。 セルリアン・サーベイヤー マルチビーム・エコーサウンダー 最大水深50メートルまでの測深に対応し、内蔵のIMUにより荒波の中でもピッチやロールを自動補正し、正確な測定結果を提供します。 SonarViewソフトウェアと組み合わせることで、海底の3D点群データをリアルタイムで生成でき、水深調査や海底マッピングに活用できます。 製品概要 Cerulea ...

2025/5/17
Cerulean Omniscan 450 サイドスキャンソナー
はじめに このソナーはBlueBoatとシームレスに連携し、サイドスキャンによる画像処理を通じて、水中の物体の位置特定や識別、海底のマッピングに役立ちます。 BlueBoatに接続するだけですぐに使用でき、BlueOSのCerulean SonarViewアプリを使ってリアルタイムでデータを可視化できます。 ※BlueBoatで使用するには、イーサネットスイッチが必要です。 製品概要 Cerulean Omniscan 450 SS は、BlueBoatに搭載して使用するサイドスキャンソナーで、海底の様子 ...

2025/5/6
ハンドヘルドPCを使ってBlueROV2を操作する方法
最近、ハンドヘルドPCの人気が急上昇しており、現在では数多くのモデルから選べるようになっています。 高い性能、優れた携帯性、そして内蔵コントローラーを備えていることから、ROV(遠隔操作無人潜水機)を操作する際の従来のノートパソコンに代わる、非常に優れた選択肢となっています。 Cockpitを動かしているSteam Deck このガイドでは、私たちが特におすすめする2つのハンドヘルドPC ― Steam DeckとLenovo Legion GO ― を実際にテストし、それらを使ってBlueROV2を操作 ...

2025/5/14
BlueROV2へのOmniscan 450 FSの取り付けガイド
Cerulean社のイメージングソナー「Omniscan 450 FS」は、最大100mの検出距離と50度の広い垂直ビーム幅を備えており、BlueROV2に搭載することで、海底ターゲットの位置特定やナビゲーションに優れた性能を発揮します。 このガイドでは、Omniscanを1台または複数台、BlueROV2に取り付ける手順をご紹介します。 Cerulean Omniscan 450 FSイメージングソナー 120mの長距離イメージングソナー Ceruleanは、Omniscan 450 FS および So ...

2025/5/6
防水エンクロージャー RAILS ユーザーガイド
防水エンクロージャー RAILS は、Blue Robotics 製の円筒形エンクロージャーに対応したモジュラー式の電子機器トレイシステムです。 このガイドでは、RAILS システムの構成や、エンクロージャーへの取り付け方法について説明します。 防水エンクロージャー RAILS 水密エンクロージャー用のモジュラー電子機器トレイシステム RAILSの互換性について RAILSを直接使用できるのは、レール取り付け部の横にアライメントホールがあるフランジのみです(下図参照)。 このRAILS対応フランジ(アライ ...

2025/5/8
Sonoptix ECHO マルチビームイメージングソナー
はじめに Sonoptix ECHOは、高性能ながらコストパフォーマンスに優れたマルチビームイメージングソナーです。 デュアル周波数機能を搭載し、近距離では高解像度、遠距離では最大200mまでの鮮明なイメージングを実現します。 直感的なクロスプラットフォーム対応のユーザーインターフェースに加え、あらかじめ装着されたペネトレーターとコネクターにより、簡単にセットアップしてすぐに使用できます。 手頃な価格で革新を実現! これまで、「マルチビームソナーがもっと手頃な価格だったら…」という声を何度も耳にしてきまし ...

2025/5/6
海中RGB LEDインジケーターガイド
海中RGB LEDインジケーターは、水中エンクロージャーやその他の機器にステータスライトを追加するのに最適なソリューションです。 このインジケーターは WS2812B LEDを使用しており、ほとんどの既存のWS2812B用ソフトウェアライブラリと互換性があります。 このガイドでは、海中 RGB LEDインジケーターの取付方法と使用方法、また BlueROV2への取付方法にについても詳しく説明します。 海中RGB LEDインジケータ 5V入力、マルチカラーLEDは数百万色を生成します インジケーターの取り付 ...

2025/4/13
基本的な ESC R3 ファームウェアファイルとカスタマイズ
はじめに これは、T100/T200 スラスターおよび M100/M200 モーター用のシンプルな電子スピードコントローラーです。 新しい R3 バージョンは、BLHeli ESC の設計を基に、機能と性能を大幅に向上させた製品となっています!ベーシック ESC T200 用双方向電子スピードコントローラー ファームウェアファイル BLHeliSuite のファームウェア設定ファイルは、以下のリンクからダウンロードできます: BR ベーシック ESC BLHeli_S(.ini) BLHeli_S の操作 ...

2025/4/13
FathomテザーをCobaltコネクターに接続する方法
ROVを持ち運びやすくするため、テザーを素早く着脱できることを求めるユーザーは多くいます。現在、Blue Roboticsではエポキシを使用しない独自のコネクターソリューションを開発中です。 このガイドでは、Blue Trail Engineeringの8ピンCobaltコネクターを使用して、Blue RoboticsのFathomテザーを適切に終端する手順を詳しく説明します。また、Blue Trail Engineeringが推奨するケーブルを使用した公式ドキュメントもこちらでご覧いただけます。 本ガイ ...
もっと見る
2025/5/17
Cerulean Surveyor 統合キット
はじめに この統合キットには、Surveyor 240-16 マルチビームエコーサウンダー(音響測深機)を BlueBoat に取り付けるために必要なすべての部品が含まれています。 通常、Blue Robotics 社から音響測深機を購入した場合には、このキットは同梱されていますが、こちらでも個別に購入いただけます。 なお、Surveyor マルチビーム音響測深機を BlueBoat で使用するには、イーサネットスイッチが必要です。 製品概要 この統合キットには、Cerulean Surveyor マルチ ...
2025/5/17
Cerulean Omniscan 450 FS マウントブラケット
はじめに Omniscan 450 FSイメージングソナーをBlueROV2に取り付けるために必要な工具とハードウェアがすべて含まれています。 このマウントブラケットは、Blue Roboticsでソナーを購入した場合に同梱されていますが、単品でも販売しています。なお、Omniscan 450 FSイメージングソナーをBlueROV2で使用するには、別途イーサネットスイッチが必要です。 製品説明 このマウントブラケットには、Cerulean Omniscan 450 FSイメージングソナーをBlueROV ...
2025/5/17
Cerulean Omniscan 450 FS イメージングソナー
はじめに Omniscan 450 FS は、最大120mの長距離レンジと、50度の広い垂直ビーム幅を備えた高性能イメージングソナーです。 海底のターゲットの特定やナビゲーションに最適です。 BlueROV2 に迅速に取り付けるためのブラケットと必要なハードウェアが同梱されています。 単体のソナーユニットとして使用できるほか、追加ユニットと組み合わせて、SonarView ソフトウェアを使用した 2D モーショントラッキングにも対応しています。 ※BlueROV2 での運用には、別途イーサネットスイッチが ...
2025/5/17
Cerulean Surveyor マルチビーム音響測深機
はじめに Surveyor 240-16は、BlueBoatやその他の小型USVに最適な、コンパクトでコストパフォーマンスに優れたマルチビーム音響測深機です。 セルリアン・サーベイヤー マルチビーム・エコーサウンダー 最大水深50メートルまでの測深に対応し、内蔵のIMUにより荒波の中でもピッチやロールを自動補正し、正確な測定結果を提供します。 SonarViewソフトウェアと組み合わせることで、海底の3D点群データをリアルタイムで生成でき、水深調査や海底マッピングに活用できます。 製品概要 Cerulea ...
2025/5/8
Sonoptix ECHO マルチビームイメージングソナー
はじめに Sonoptix ECHOは、高性能ながらコストパフォーマンスに優れたマルチビームイメージングソナーです。 デュアル周波数機能を搭載し、近距離では高解像度、遠距離では最大200mまでの鮮明なイメージングを実現します。 直感的なクロスプラットフォーム対応のユーザーインターフェースに加え、あらかじめ装着されたペネトレーターとコネクターにより、簡単にセットアップしてすぐに使用できます。 手頃な価格で革新を実現! これまで、「マルチビームソナーがもっと手頃な価格だったら…」という声を何度も耳にしてきまし ...
2025/4/13
FathomテザーをCobaltコネクターに接続する方法
ROVを持ち運びやすくするため、テザーを素早く着脱できることを求めるユーザーは多くいます。現在、Blue Roboticsではエポキシを使用しない独自のコネクターソリューションを開発中です。 このガイドでは、Blue Trail Engineeringの8ピンCobaltコネクターを使用して、Blue RoboticsのFathomテザーを適切に終端する手順を詳しく説明します。また、Blue Trail Engineeringが推奨するケーブルを使用した公式ドキュメントもこちらでご覧いただけます。 本ガイ ...

2025/4/13
BlueROV2ルーフラックの取り付け
はじめに BlueROV2ルーフラックは、BlueROV2の上部または前部に多くのものを取り付けるための便利な取り付けポイントを提供します。 ウォータータイト・エンクロージャー・クランプ、ルーメン・ライト、ニュートン・グリッパー、Ping360ソナー、Sonoptix ECHOソナー、標準的な1/4-20 UNC三脚マウントを取り付けるためのマウントポイントがあります。 BlueROV2ルーフラック このガイドでは、BlueROV2への取り付け方法を説明します。 取り付け位置 ルーフラックは、BlueRO ...

2025/4/13
Water Linked DVL A50・A125
はじめに Water Linked社のドップラー速度ログ(DVL)は、車両の正確な速度計測を提供し、BlueROV2やその他の車両の位置保持や自律航行を可能にします。 DVL A50の特徴 世界最小のDVL。 最大水深300mまでの環境で使用可能。 測定範囲 : 海底から5cm〜50m。 長期的な精度 : ±1%の精度を維持。 製品概要 DVL A50とA125は、高性能なDVLでありながら非常にコンパクトな設計で、ROVやAUVの位置保持や自律航行といった高度な機能を実現します。 各モデルには、WetL ...

2025/4/13
防水ボックス ユーザーガイド
防水ボックス ユーザーガイド 防水ボックスは、耐圧性や耐腐食性に優れており、さまざまな用途に柔軟に対応する設計となっています。 本ガイドでは、防水ボックスの組み立て方法と使用手順について詳しく説明します。 一般情報と安全性 注意 1: 安全な運用を確保するため、必ず圧力逃し弁を設置してください。 防水ボックスの蓋は表面積が大きく、内圧がかかると非常に危険な状態になる恐れがあります。圧力逃し弁を使用することで、内圧を安全に解放できます。 注意 2: 防水ボックスを絶対に加圧しないでください。 注意 3: 蓋 ...

2025/1/14
BlueROV2搭載可能な濁度対応カメラORPHIECAM 300
水中ドローンによる水中探査は、海底地形の計測や漁場の資源調査、水中構造物(橋脚や堰堤、パイプラインなど)の劣化チェック、海洋生態系のモニタリングといった、多岐にわたる分野で活用されています。 しかし、これらの現場では、水中に舞う堆積物やプランクトン、底泥の巻き上がりなどが原因で、透明度が大きく低下することもしばしばです。 こうした濁った視界下では、一般的な水中カメラでは明瞭な映像を得るのが難しくなります。 そんな状況で頼りになるのが、BlueROV2に搭載できる濁度対応カメラORPHIECAM300です。 ...
2024/12/16
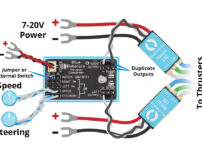
スラスターコマンダー|T200スラスター専用簡易コントローラー
スラスターを簡単に制御するためのシンプルなソリューション スラスターコマンダーは、T100やT200スラスターを簡単に制御するために設計された専用コントローラーです。DIYプロジェクトや小型ボート、ROVの初期テストなどに最適で、直感的な操作性を提供します。 製品の特長 簡単操作 ダイヤル式のスロットルとスイッチ操作で、スラスターのスピードと方向を簡単に制御可能。初心者でも扱いやすい設計です。 複数スラスター対応 最大2つのスラスターを同時に制御可能で、前進、後退、回転といった動作をスムーズに実現します。 ...

2025/1/5
Cerulean Omniscan 450 サイドスキャンソナー
このソナーはBlueBoatとシームレスに統合され、サイドスキャンソナーによるイメージングを提供し、水中物体の位置確認や特定、海底のマッピングに役立ちます。
BlueBoatですぐに使用でき、BlueOSのCerulean SonarViewアプリケーションを使用してリアルタイムでデータを視覚化します。
BlueBoatで使用するにはイーサネットスイッチが必要です。
お問合せ下さい
もっと見る
2025/5/17
Cerulean Omniscan 450 サイドスキャンソナー
はじめに このソナーはBlueBoatとシームレスに連携し、サイドスキャンによる画像処理を通じて、水中の物体の位置特定や識別、海底のマッピングに役立ちます。 BlueBoatに接続するだけですぐに使用でき、BlueOSのCerulean SonarViewアプリを使ってリアルタイムでデータを可視化できます。 ※BlueBoatで使用するには、イーサネットスイッチが必要です。 製品概要 Cerulean Omniscan 450 SS は、BlueBoatに搭載して使用するサイドスキャンソナーで、海底の様子 ...
2025/5/6
ハンドヘルドPCを使ってBlueROV2を操作する方法
最近、ハンドヘルドPCの人気が急上昇しており、現在では数多くのモデルから選べるようになっています。 高い性能、優れた携帯性、そして内蔵コントローラーを備えていることから、ROV(遠隔操作無人潜水機)を操作する際の従来のノートパソコンに代わる、非常に優れた選択肢となっています。 Cockpitを動かしているSteam Deck このガイドでは、私たちが特におすすめする2つのハンドヘルドPC ― Steam DeckとLenovo Legion GO ― を実際にテストし、それらを使ってBlueROV2を操作 ...
2025/5/14
BlueROV2へのOmniscan 450 FSの取り付けガイド
Cerulean社のイメージングソナー「Omniscan 450 FS」は、最大100mの検出距離と50度の広い垂直ビーム幅を備えており、BlueROV2に搭載することで、海底ターゲットの位置特定やナビゲーションに優れた性能を発揮します。 このガイドでは、Omniscanを1台または複数台、BlueROV2に取り付ける手順をご紹介します。 Cerulean Omniscan 450 FSイメージングソナー 120mの長距離イメージングソナー Ceruleanは、Omniscan 450 FS および So ...
2025/5/6
防水エンクロージャー RAILS ユーザーガイド
防水エンクロージャー RAILS は、Blue Robotics 製の円筒形エンクロージャーに対応したモジュラー式の電子機器トレイシステムです。 このガイドでは、RAILS システムの構成や、エンクロージャーへの取り付け方法について説明します。 防水エンクロージャー RAILS 水密エンクロージャー用のモジュラー電子機器トレイシステム RAILSの互換性について RAILSを直接使用できるのは、レール取り付け部の横にアライメントホールがあるフランジのみです(下図参照)。 このRAILS対応フランジ(アライ ...
2025/5/6
海中RGB LEDインジケーターガイド
海中RGB LEDインジケーターは、水中エンクロージャーやその他の機器にステータスライトを追加するのに最適なソリューションです。 このインジケーターは WS2812B LEDを使用しており、ほとんどの既存のWS2812B用ソフトウェアライブラリと互換性があります。 このガイドでは、海中 RGB LEDインジケーターの取付方法と使用方法、また BlueROV2への取付方法にについても詳しく説明します。 海中RGB LEDインジケータ 5V入力、マルチカラーLEDは数百万色を生成します インジケーターの取り付 ...
2025/4/13
基本的な ESC R3 ファームウェアファイルとカスタマイズ
はじめに これは、T100/T200 スラスターおよび M100/M200 モーター用のシンプルな電子スピードコントローラーです。 新しい R3 バージョンは、BLHeli ESC の設計を基に、機能と性能を大幅に向上させた製品となっています!ベーシック ESC T200 用双方向電子スピードコントローラー ファームウェアファイル BLHeliSuite のファームウェア設定ファイルは、以下のリンクからダウンロードできます: BR ベーシック ESC BLHeli_S(.ini) BLHeli_S の操作 ...
2025/4/13
FathomテザーをCobaltコネクターに接続する方法
ROVを持ち運びやすくするため、テザーを素早く着脱できることを求めるユーザーは多くいます。現在、Blue Roboticsではエポキシを使用しない独自のコネクターソリューションを開発中です。 このガイドでは、Blue Trail Engineeringの8ピンCobaltコネクターを使用して、Blue RoboticsのFathomテザーを適切に終端する手順を詳しく説明します。また、Blue Trail Engineeringが推奨するケーブルを使用した公式ドキュメントもこちらでご覧いただけます。 本ガイ ...
2025/4/13
BlueROV2ルーフラックの取り付け
はじめに BlueROV2ルーフラックは、BlueROV2の上部または前部に多くのものを取り付けるための便利な取り付けポイントを提供します。 ウォータータイト・エンクロージャー・クランプ、ルーメン・ライト、ニュートン・グリッパー、Ping360ソナー、Sonoptix ECHOソナー、標準的な1/4-20 UNC三脚マウントを取り付けるためのマウントポイントがあります。 BlueROV2ルーフラック このガイドでは、BlueROV2への取り付け方法を説明します。 取り付け位置 ルーフラックは、BlueRO ...

2025/5/2
cockpitソフトウェアの紹介
概要 Cockpit は、あらゆる種類のリモートビークルに対応した、直感的かつカスタマイズ可能なクロスプラットフォーム対応のコントロールステーションソフトウェアです。 ちょっとした背景情報 現在のコントロールステーションソフトウェア市場には、「すぐに使えて」「直感的で扱いやすく」「汎用性が高く」「カスタマイズや開発がしやすく」「クロスプラットフォームに対応している」といった特徴を備えた製品が不足しています。 このようなニーズに応えるべく、そして「理想的なコントロールステーションとは何か」という長年の想いを ...
2025/4/13
防水ボックス ユーザーガイド
防水ボックス ユーザーガイド 防水ボックスは、耐圧性や耐腐食性に優れており、さまざまな用途に柔軟に対応する設計となっています。 本ガイドでは、防水ボックスの組み立て方法と使用手順について詳しく説明します。 一般情報と安全性 注意 1: 安全な運用を確保するため、必ず圧力逃し弁を設置してください。 防水ボックスの蓋は表面積が大きく、内圧がかかると非常に危険な状態になる恐れがあります。圧力逃し弁を使用することで、内圧を安全に解放できます。 注意 2: 防水ボックスを絶対に加圧しないでください。 注意 3: 蓋 ...

2025/2/2
BlueBoat 6S バッテリースプリッターケーブルの取り付け
製品紹介 BlueBoat 6S バッテリースプリッターを使用することで、Blue Robotics製リチウムイオンバッテリー(22.2V、28Ah)などの6Sリチウムバッテリーを、BlueBoatに安全かつ簡単に接続できます。 インストール インストールの手順 左舷と右舷のハッチ蓋を開け、船体内部にアクセスします。 BlueBoatに既に4Sスプリッターケーブルが装着されている場合は、クロスケーブルから取り外してください。必要に応じて、ケーブルタイをクリップで切り離すことがあるかもしれません。 各船体に ...

2025/2/2
Ping高度計修理ガイド
はじめに 本ガイドは、Pingの修理工程を安心して簡単に進められるよう設計されています。 ここでは、PingのPCB(プリント基板)およびケーブルを交換する手順を、分かりやすく順を追って説明します。それでは、早速始めましょう! Pingを分解する 第一世代のPing高度計を開けるには、Ping高度計をしっかりと保持し、青いリングを反時計回りに回してください。 第2世代のPing高度計を開けるには、まずプラスチック製のロックコードを引き抜きます。その後、慎重にケースから上部を取り外してください。 半分を引き ...
もっと見る



{kind=link}