

Cerulean社のイメージングソナー「Omniscan 450 FS」は、最大100mの検出距離と50度の広い垂直ビーム幅を備えており、BlueROV2に搭載することで、海底ターゲットの位置特定やナビゲーションに優れた性能を発揮します。
このガイドでは、Omniscanを1台または複数台、BlueROV2に取り付ける手順をご紹介します。

Cerulean Omniscan 450 FSイメージングソナー
120mの長距離イメージングソナー
Ceruleanは、Omniscan 450 FS および SonarViewソフトウェアに関する充実したドキュメントを提供しています。
機器の統合が完了したら、使用方法や便利なヒントが満載の各種ガイドをぜひご覧ください。
キット内容
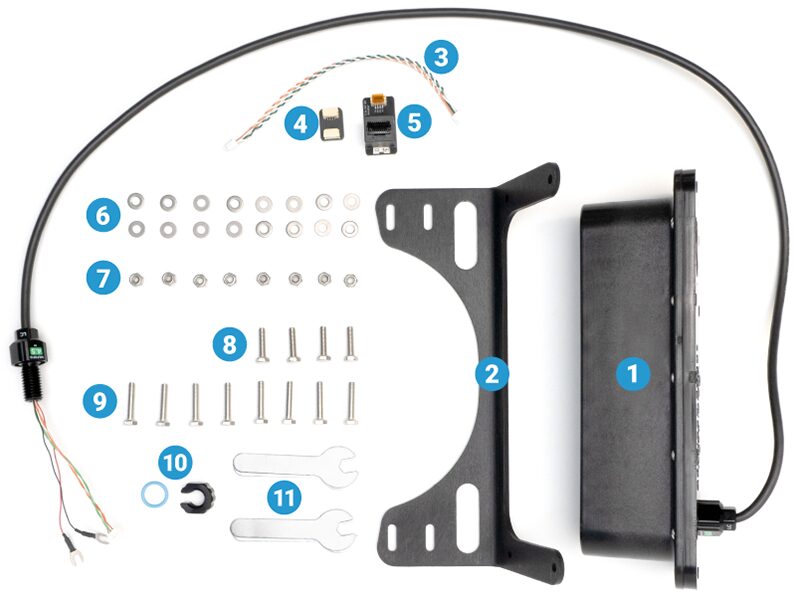 Cerulean Omniscan 450 FS ×1
Cerulean Omniscan 450 FS ×1- Omniscan 450 FS 取付ブラケット ×1
- 150mm JST GH - JST GH ツイストペアケーブル(BR-100557)×1
- 4ピン JST GH - JST GH カプラー(BR-100509)×1
- RJ45 - JST GH アダプター(BR-100555)×1
- M4 ワッシャー(BR-103527)×16
- M4 ロックナット(BR-102250)×8
- M4×16 六角ボルト(BR-103528)×4
- M4×20 六角ボルト(BR-103519)×8
- M10 バルクヘッドナット & -013 Oリング(BR-100167-010)×1
- 7mm スパナ(BR-103514)×2
2D位置トラッキング
SonarViewは、ソナー画像をもとにした2D位置トラッキングに対応しています。
この機能を有効にするには、以下のいずれかの方法を使用します。
- DVL(ドップラー速度ログ)などの外部位置データを受信する。
- Omniscan 450 FSソナーを2台以上同時に使用し、ドップラーモードを有効にする。
取り付けオプション
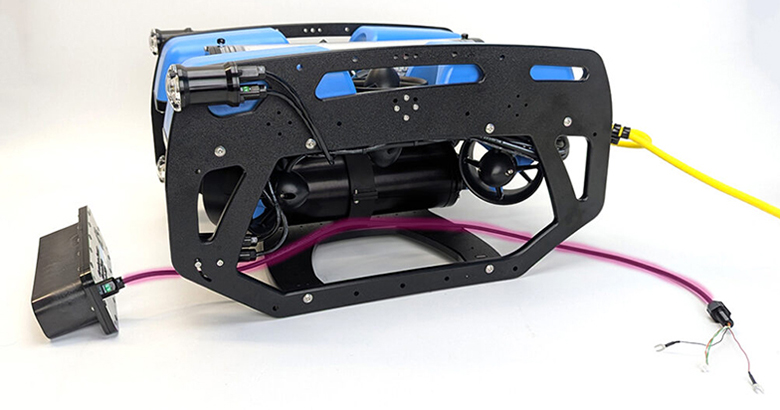
Omniscan 450 FSは、BlueROV2の上部または下部フレームパネルに取り付けることが可能です。
どちらの位置でも性能に違いはないため、ROVの構成や他のアクセサリーとの兼ね合いを考慮して、最適な取り付け場所を選んでください。
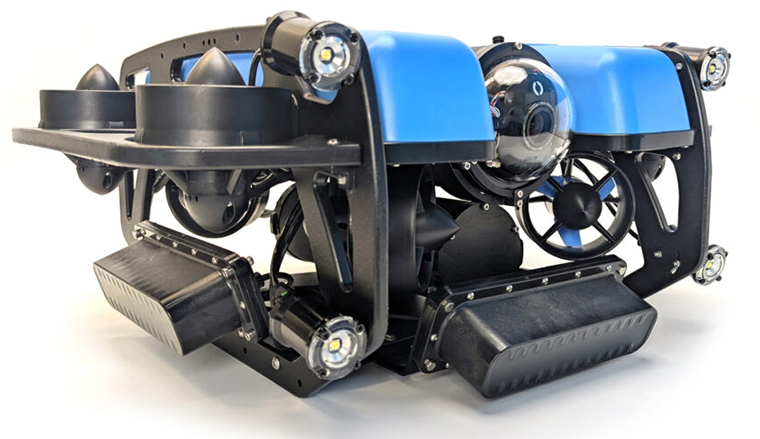
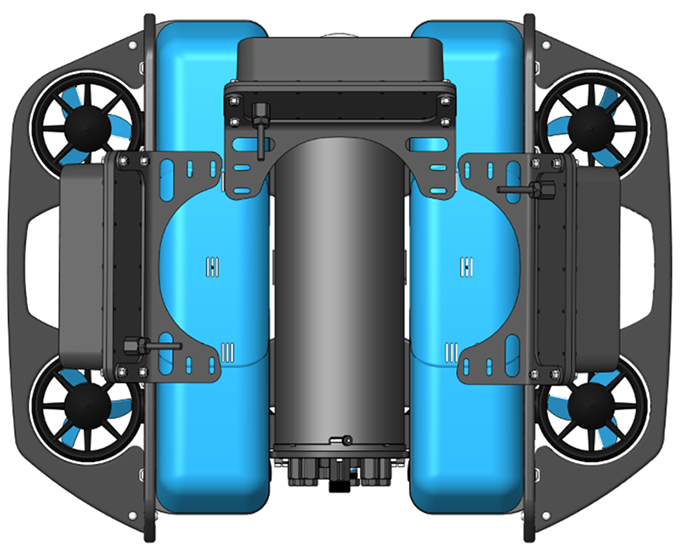
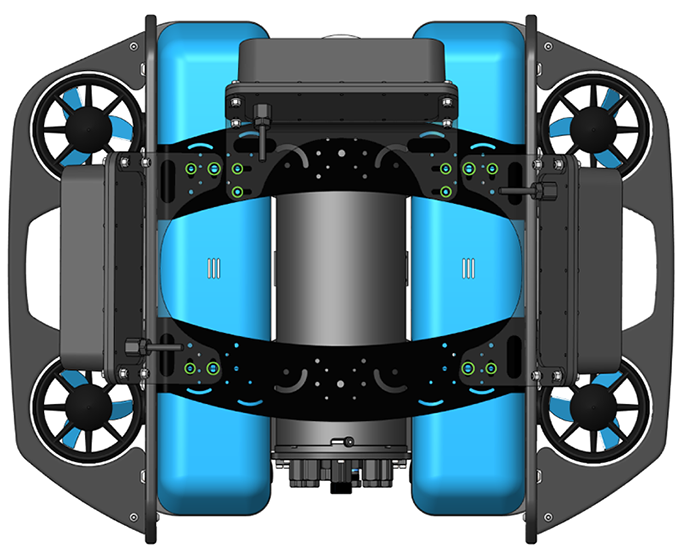
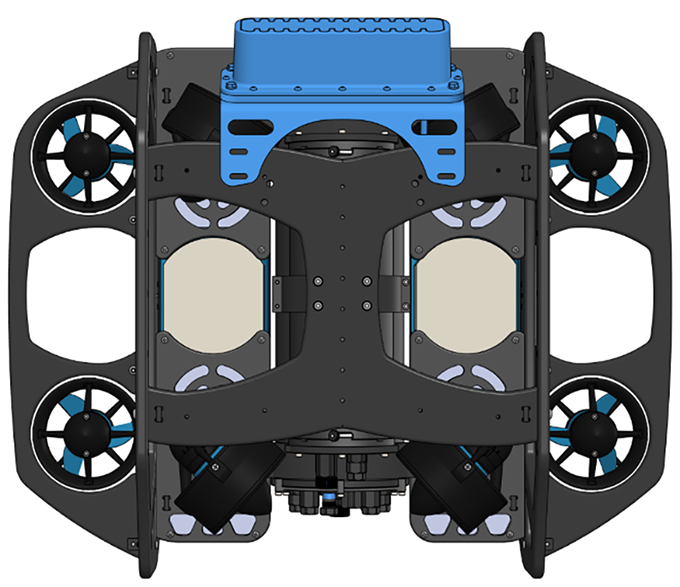
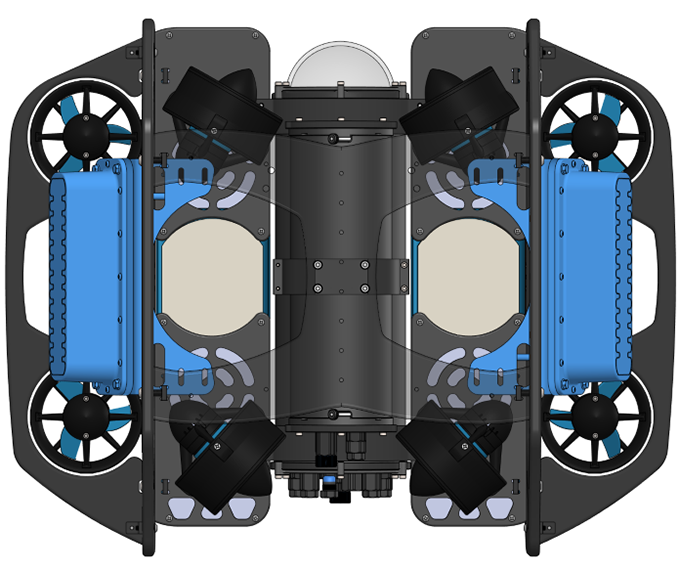
下の画像は、BlueROV2にOmniscanを2台取り付けた例です。
上部にOmniscanを取り付ける場合は、ルーフラックが必要です。複数台取り付ける場合は、台数分のルーフラックが必要になります。
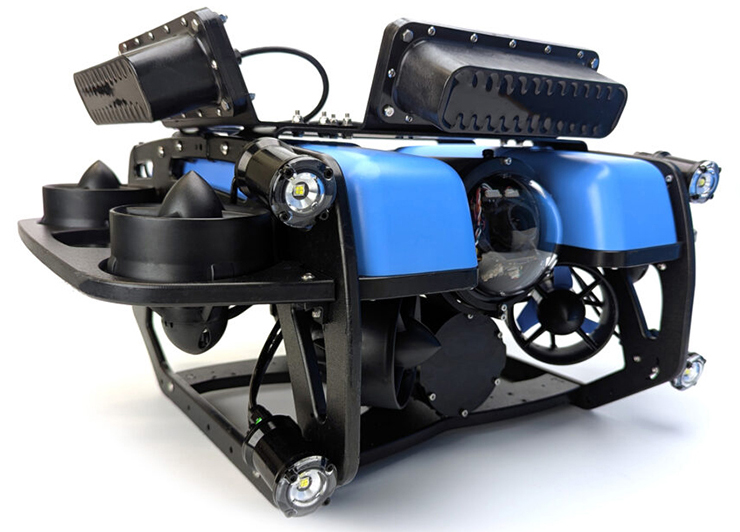
下部に取り付ける場合は、底部パネルに穴を開けて直接固定することができます。
単一または複数のOmniscanの搭載
Omniscanは、1台でも複数台でも同時に使用することができます。
複数台を取り付けることで、スキャン可能な範囲が広がるだけでなく、SonarViewの「ドップラーモード」を使って2D位置トラッキングを行うことも可能になります。
1台のみ使用する場合は、通常 前方に向けて取り付けるのが最も効果的です。
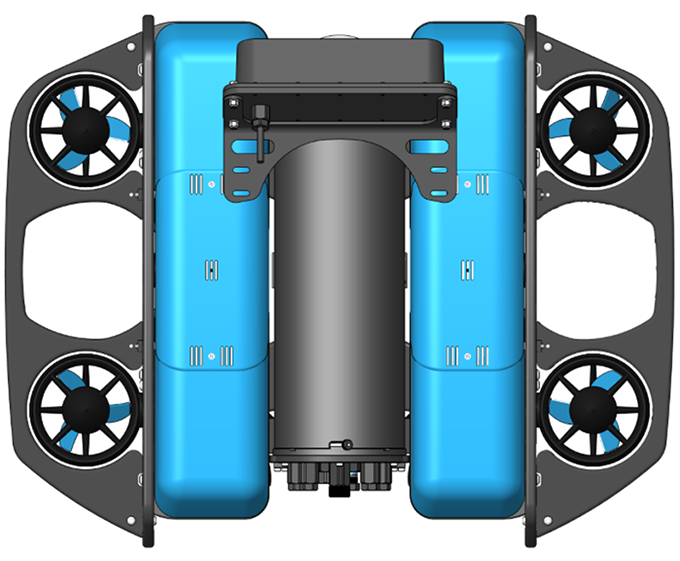 複数台で2Dトラッキングを行う場合は、ソナー同士を直角に配置する必要があります。
複数台で2Dトラッキングを行う場合は、ソナー同士を直角に配置する必要があります。
たとえば、1台目を前方に向けて設置した場合、2台目は左舷または右舷に向けて取り付けてください。
取り付けに必要な部品と工具
Omniscan 450 FSキットに加えて、取り付け作業を完了するためには以下の部品や工具が必要です。
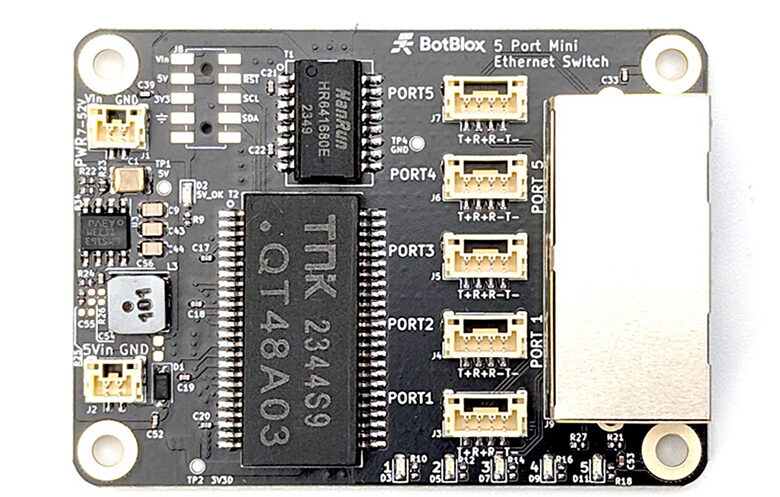
イーサーネットスイッチ
BlueBoatおよびBlueROV2用のコンパクトなイーサーネットスイッチ
必要な部品・工具
- M10 バルクヘッドレンチ ×1
- 2.5 mm 六角ドライバー ×1
- #2 プラスドライバー ×1
- シリコングリース(推奨:Molykote 111)
- ケーブルタイ(ケーブルの整理用)
- ※オプション:7 mm ソケットとラチェット(キットに含まれる7 mmレンチの代わりに使うと作業がスムーズです)
上部に取り付ける場合に追加で必要なもの
- ルーフラック ×1(複数のOmniscanを取り付ける場合は ×2)
- 3 mm 六角ドライバー ×1
下部に取り付ける場合に追加で必要なもの
- 電動ドリル
- 4.5 mm(約3/16インチ)ドリルビット
- マーカー(穴開け位置のマーキング用)
BlueROV2の準備
Omniscanを取り付けるには、BlueROV2のエレクトロニクス・エンクロージャー(電子機器筐体)を開き、既存のバルクヘッドペネトレーターを取り外す必要があります。
必要な工具
- 2.5 mm 六角ドライバー ×1
- M10 バルクヘッドレンチ ×1
作業手順に不明点がある場合は、BlueROV2操作ガイドの「BlueROV2の修理」セクションを参照してください。
【 手順 】
- バッテリーを取り外し、ROVの電源が完全にオフであることを確認します。
- 2.5 mm 六角ドライバーを使って、エンクロージャをクレードルに固定しているM3x16取り付けネジを外します。
その後、PRV(加圧リリーフバルブ)または通気プラグを外し、電子機器エンクロージャチューブをエンクロージャーアセンブリから取り外します。

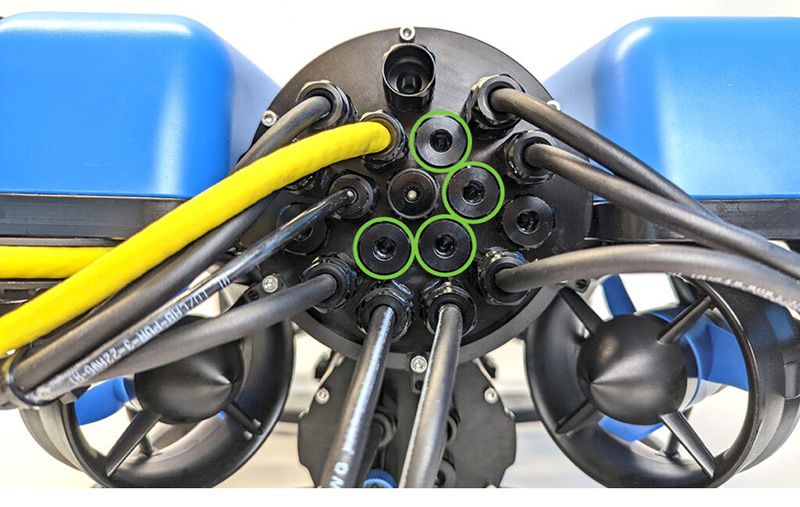
- エンドキャップ中央にある空のペネトレーターを1つ選び、M10バルクヘッドレンチで取り外します。
※複数のOmniscanを取り付ける場合は、それに応じて複数の空ペネトレーターを取り外してください。
- Blue Robotics製イーサネットスイッチをまだ取り付けていない場合は、ここで取り付けてください。
取り付け方法は、同梱の「イーサネットスイッチ インストールガイド」を参照してください。完了したら、このガイドに戻って作業を続けてください。
ハードウェアのインストール
組み立て作業中に不明点やトラブルがありましたら、いつでもお気軽にお問い合わせください。
POINT!
このガイドに記載されているネジのサイズはメートル法(ミリメートル)で表記されており「M#×#」の形式に従っています。
- 最初の数字(例:M4)はネジの直径を示し、数字が大きいほど太くなります。
- 2番目の数字(例:×16)はネジの長さを示し、数字が大きいほど長くなります。
バルクヘッドペネトレーターの取り付け
Omniscanのバルクヘッドペネトレーターをエンドキャップに取り付けるには、以下の部品と工具が必要です。
必要な部品・工具
- Omniscan本体(1台または複数)
- M10 バルクヘッドナット ×1(Omniscanに付属)
- -013 Oリング ×1(Omniscanに付属)
- M10 バルクヘッドレンチ ×1
- シリコングリース(推奨:Molykote 111)
【 手順 】
- Omniscanをどこに取り付け、ケーブルをどう配線するかを事前に検討します。特にROVの底部に取り付ける場合は、バルクヘッドペネトレーターの取り付け前に、ケーブルを取り付け位置からROV後部へフレームを通して配線しておきます。
- 空のペネトレーターを取り外したエンドキャップの外側をきれいに拭き取り、Oリングの接触面にホコリやゴミが残っていないことを確認します。
- Oリングに汚れや傷がないかを確認してください。
- Oリングにシリコングリースを薄く塗布し、バルクヘッドペネトレーターの溝に取り付けます。

- バルクヘッドペネトレーターを穴に挿入し、反対側からバルクヘッドナットを取り付けて手で締めます。その後、バルクヘッドレンチを使ってしっかりと固定します。正しく取り付けられていれば、ペネトレーターは回転せず、手では緩まない状態になります。
ワイヤー接続と再組み立て
このステップで必要な部品・工具は以下の通りです。
必要な部品・工具
- 150mm JST GH - JST GH ツイストペアケーブル ×1(Omniscan付属)
- 4ピン JST GH - JST GH カプラー ×1(Omniscan付属)
- #2 プラスドライバー ×1
- 2.5mm 六角ドライバー ×1
- 取り外しておいた M3 取り付けネジ
- シリコングリース(推奨:Molykote 111)
【 手順 】
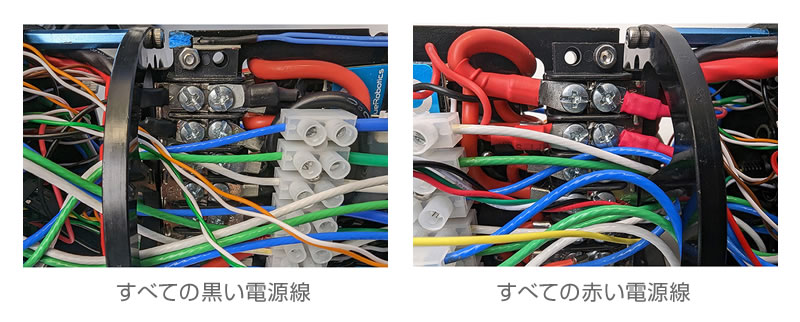
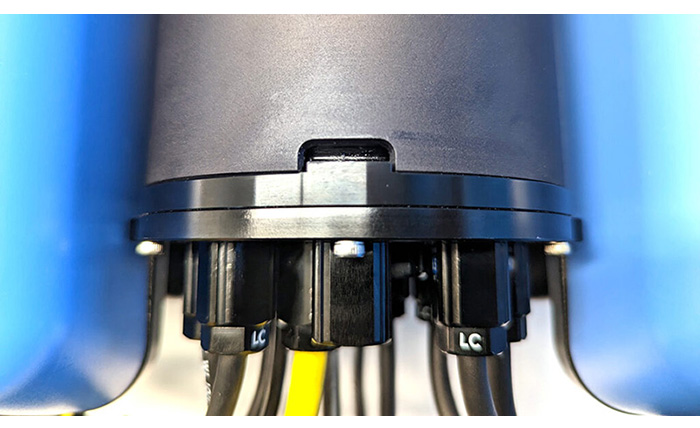
- #2プラスドライバーを使って、Omniscanケーブルの電源線(スペード端子)をROVの電源端子台の空き端子に接続します。黒線は他の黒線と一緒に、赤線は他の赤線と一緒に接続してください。
- 150mm JST GHツイストペアケーブルを4ピンJST GHカプラーに接続し、そのカプラーをOmniscanケーブル先端の4ピンコネクタに接続します。
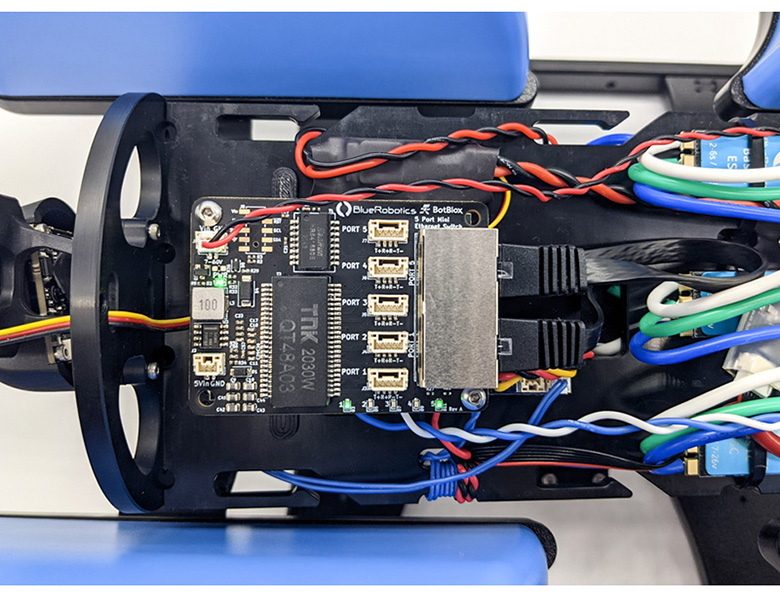
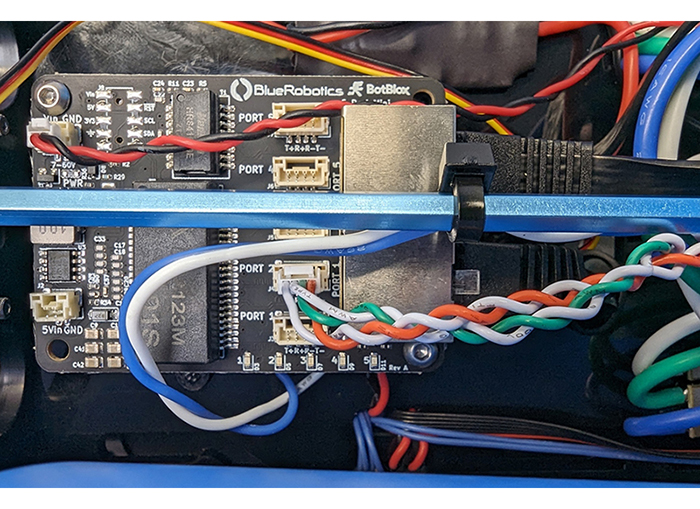
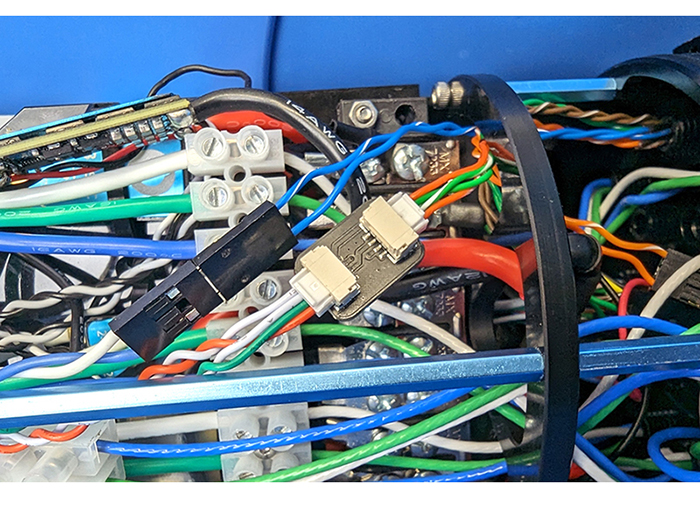 150mmのJST GHツイストペアケーブルのもう一方の端を、イーサネットスイッチの空いているポートに接続してください。
150mmのJST GHツイストペアケーブルのもう一方の端を、イーサネットスイッチの空いているポートに接続してください。
ただし、ポート1とポート5はすでに使用されているため、接続しないでください。
- 複数のOmniscanを使用する場合は、同様の手順を繰り返して接続してください。すべての内部接続が完了したら、ROVを再組み立てできます。Oリングフランジとチューブ端の2つのラジアルOリングに、シリコングリースを薄く塗布します。
- チューブとドームアセンブリをフランジに再び取り付けます。
ROVにロック式エンクロージャーがある場合は、回転ロックタブがチューブのスロットに正しく収まっていることを確認してください。
- ROVにロックコードがある場合は、スロットに通します。
- PRV(加圧リリーフバルブ)またはベントプラグを再度バルクヘッドに取り付け、時計回りに回してしっかりと密閉します。
- エレクトロニクス・エンクロージャをクレードルにセットし、取り付けクリップをネジ穴に合わせて固定します。
2.5mm六角ドライバーを使い、フロントとリアのクレードル両方にネジでしっかり固定してください。
POINT!
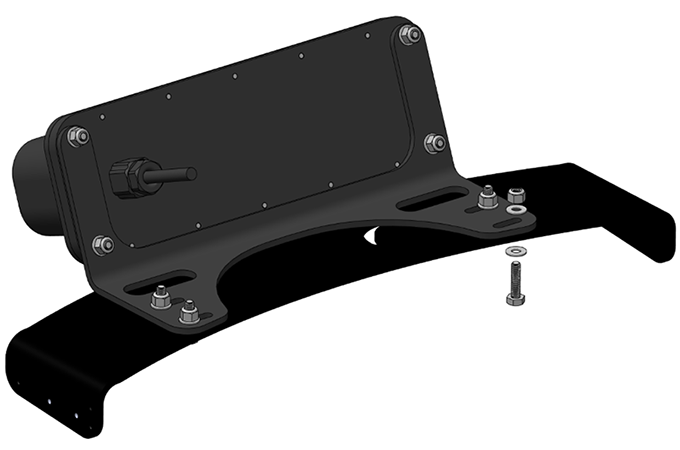
ブランケットの取り付け
必要なもの(すべてOmniscanに付属)
- Omniscan 450 FS取り付けブラケット
- M4x20 六角ネジ × 4本
- M4 ワッシャー × 8個
- M4 ロックナット × 4個
- 2本の 7 mm レンチ(または 7 mm ソケットとラチェット ※こちらは付属していません)
【 手順 】
- 1つの穴には、M4×20のネジ1本、M4ロックナット1個、ワッシャー2枚を使用します。
- ワッシャーは、ネジの頭とOmniscan本体の間に1枚、ナットとブラケットの間に1枚挿入してください。
- 取り付けの際は、付属の7mmスパナを使い、1本でネジの頭を固定し、もう1本でナットを締めます。または、7mmソケット付きのラチェットがあれば、それを使って作業することも可能です。

次のセクションでは、OmniscanをROVに取り付ける方法について説明します。
取り付け位置によって、参照するセクションが異なります。
- 上部に取り付ける場合は「Omniscan 450 FSの上部への取り付け」セクションをご覧ください。
- 底面に取り付ける場合は「Omniscan 450 FSの底面取り付け」セクションをご覧ください。
Omniscan 450 FSの上部への取り付け
このセクションでは、OmniscanをROVの上部に取り付ける手順を説明します。
必要な部品と工具
- ルーフラック
- M5×12 ボタンヘッドキャップスクリュー × 4本(ルーフラックに付属)
- M4×16 六角ヘッドスクリュー × 4本(Omniscanに付属)
- M4ロックナット × 4個(Omniscanに付属)
- M4ワッシャー × 8個(Omniscanに付属)
- 7mmレンチ × 2本(Omniscanに付属)
- ※または7mmソケットとラチェット(こちらは付属しません)
- 3mm六角ドライバー × 1本
【 取り付け方法 】
前向きに取り付ける場合は、下図に示された穴位置を使用して、ブラケットをルーフラックの上部に固定します。
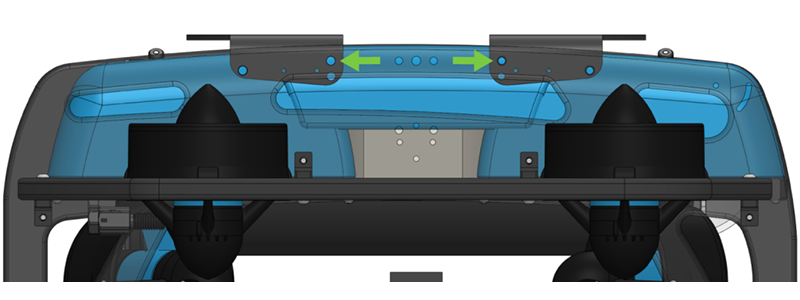
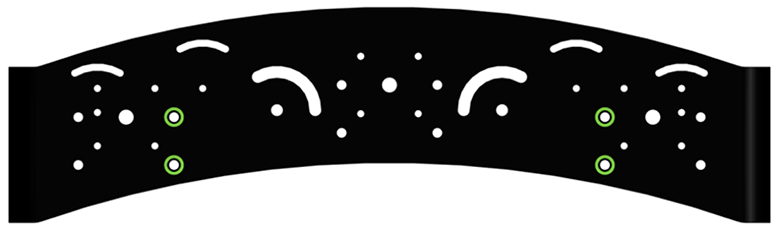 複数のOmniscanを取り付ける場合、横向きのOmniscanは、2つのルーフラックにまたがるように取り付け、対応する穴を使用してください。
複数のOmniscanを取り付ける場合、横向きのOmniscanは、2つのルーフラックにまたがるように取り付け、対応する穴を使用してください。
【 上部への取付手順 】
1. ブラケットをルーフラックに取り付ける
- M4×16 六角ボルト、ロックナット、ワッシャーを使用して、ブラケットをルーフラックに固定します。
- ボルトはルーフラックの下側から差し込み、以下の順で部品を取り付けます。
- ボルトの頭とルーフラックの間にワッシャー1枚
- ナットとブラケットの間にワッシャー1枚
- 横向きにソナーを取り付ける場合は、次のステップでルーフラックをROVフレームに固定する際に位置を微調整できるよう、この時点ではボルトを完全に締めず、軽く固定しておいてください。
2. ルーフラックをROVフレームに取り付ける
- Omniscanを取り付けたルーフラックを、M5×12 ボタンヘッドねじと3mm六角ドライバーを使ってROVフレームに取り付けます。
- 前方および後方の取り付け位置は、下図を参照してください。
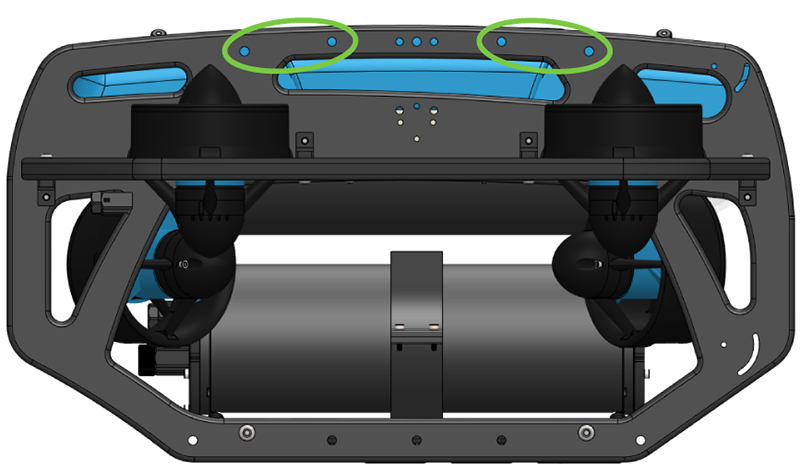
- ラックは、高い側の取り付け穴を使用して、水平になるように設置してください。
3. 取り付けの最終調整
- ルーフラックをROVにしっかりと固定した後、手順1でブラケットのボルトを仮締めにしていた場合は、7mmスパナを使ってしっかりと本締めしてください。
Omniscan 450 FSの底面取り付け
このセクションでは、OmniscanをROVの底面に取り付ける方法について説明します。
必要な部品・工具
- M4×20 六角ネジ × 4本(Omniscanに付属)
- M4ロックナット × 4個(Omniscanに付属)
- M4ワッシャー × 8個(Omniscanに付属)
- 7mmレンチ × 2本(付属) または 7mmソケット+ラチェット(付属していません)
- 電動ドリル
- 4.5mm または 3/16インチのドリルビット
- マーカー(穴あけ位置の印つけ用)
ソナーの取り付け位置
前方ソナーおよび横向きソナーの推奨取り付け位置は、以下の図を参照してください。
前向きの取付位置
側面に面した取り付け位置
【 底面への取付手順 】
1. バラストウェイトを取り外す
- 作業の邪魔になるバラストウェイトを一時的に取り外します。
- 取り付け用ブラケットをテンプレートとして使用し、ボトムパネルに取り付け穴の位置をマーカーで印付けします。
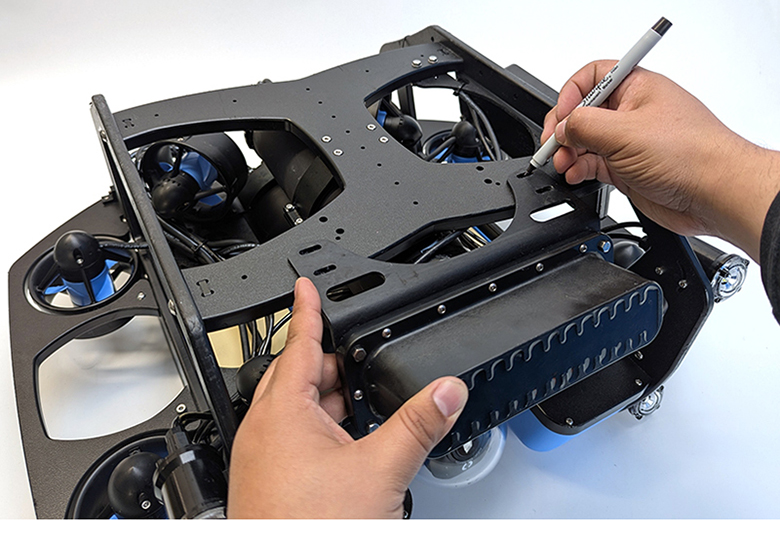
2. 穴を開ける
- 4.5mmまたは3/16インチのドリルビットを使用して、ボトムパネルに印をつけた箇所に穴を開けます。
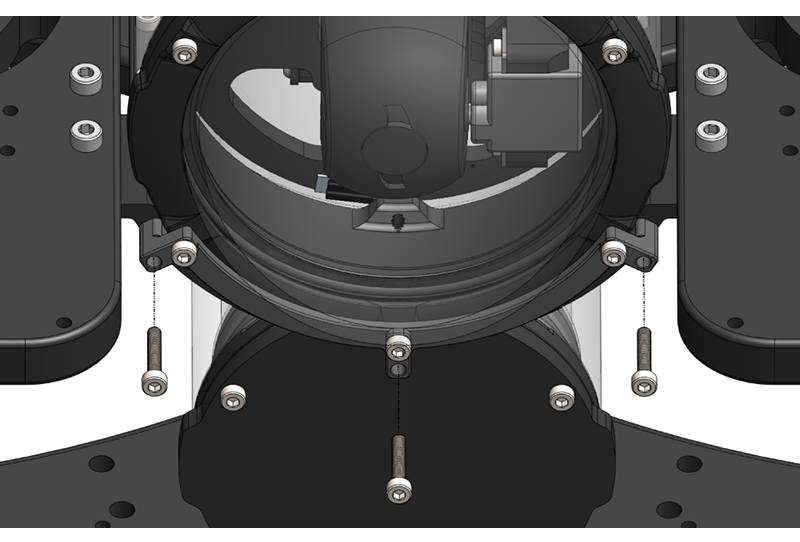
3. ブラケットを取り付ける
- M4×20六角ネジ、ロックナット、ワッシャーを使って、ブラケットをパネルに固定します。
- ワッシャーは以下のように使用してください。
- ネジの頭とパネルの間に1枚
- ナットとパネルの間に1枚
ソナーの種類に応じたブラケットの取り付け方:
- 前向きソナーの場合:
ブラケットはボトムパネルの下側に取り付けます。スラスターとソナーの間に十分なクリアランス(隙間)を確保してください。 - 横向きソナーの場合:
ブラケットはボトムパネルの上側に取り付けます。
ケーブル管理
適切なケーブル管理を行うことで、緩んだケーブルがROVのフレームにしっかり固定され、障害物への引っかかりやスラスタープロペラによる損傷を防ぐことができます。
- ケーブルタイを使って、ケーブルをフレームにしっかり固定してください。
- 固定後は、ケーブルにたるみがないか確認します。
- 最後に、ケーブルがスラスタープロペラに接触しないことをダブルチェックしましょう。
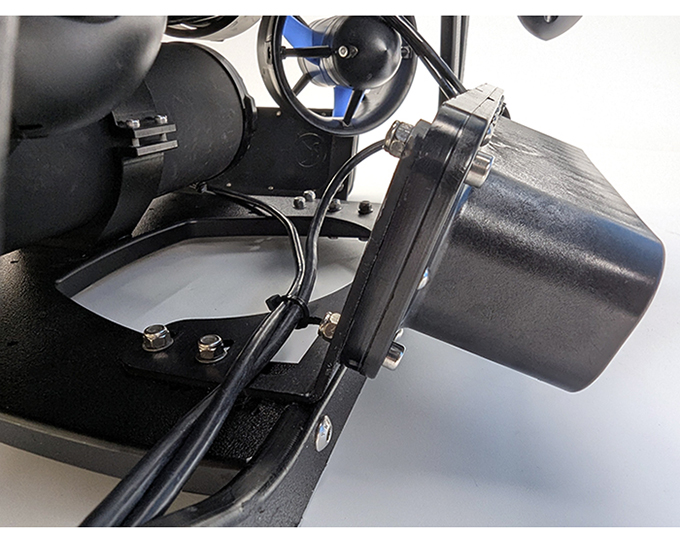
下部に取り付けられたソナーのケーブル管理の例
フレームのバラスト調整
ソナーおよびラックの取り付けにより、BlueROV2のフレームに追加の重量がかかります。そのため、ROVのバラストを調整して、中性浮力と安定した水中バランスを維持する必要があります。
POINT!
バラスト調整の詳細については、
『BlueROV2操作ガイド』の「BlueROV2の整備」セクションをご参照ください。
ソフトウェアのセットアップ
Omniscan 450 FS の出力は、SonarView を使って表示されます。SonarView は、BlueOS の拡張機能として利用することも、パソコン用アプリケーションとしてインストールすることも可能です。
SonarView拡張機能のインストール
- BlueROV2の電源を入れ、コンピューターに接続します。
接続方法がわからない場合は、まず「BlueROV2ソフトウェアセットアップガイド」をご確認ください。 - ウェブブラウザのアドレスバーに「192.168.2.2」または「blueos.local」と入力し、BlueOS(BlueROV2のオペレーティングシステム)にアクセスします。
- BlueROV2をWi-Fiネットワークに接続します。
- 拡張機能を使用するには、BlueOSのバージョンが1.1.0以降である必要があります。
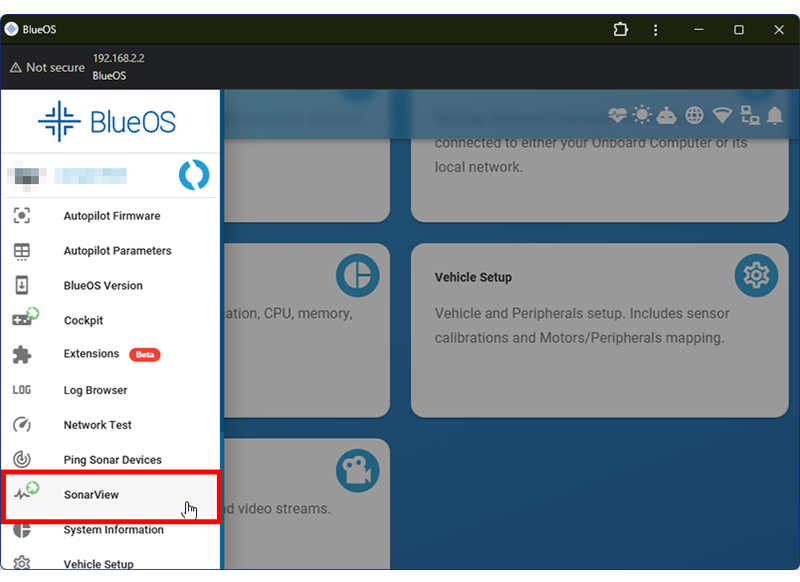
お使いのシステムが古い場合は、BlueOSをアップデートしてから、このガイドに戻ってください。 - BlueOSの拡張機能「Extensions」メニューを開き、「Cerulean Sonar」の「SONARVIEW」拡張機能をインストールします。
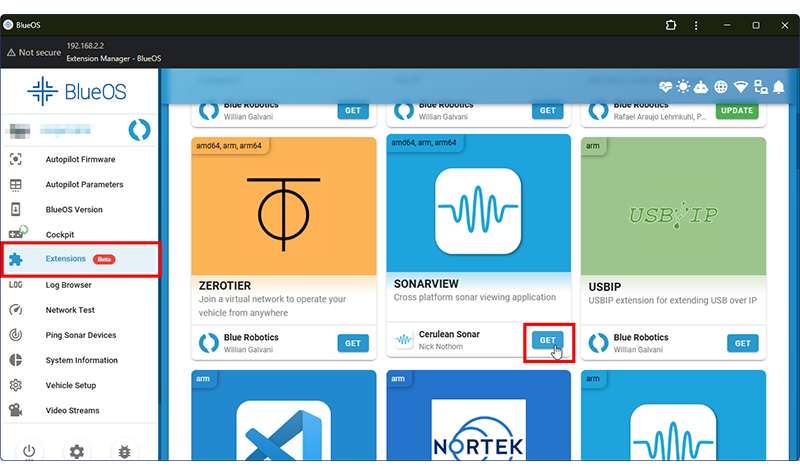
- 拡張機能のインストールが完了すると、SonarViewが左サイドバーに表示されます。
SonarViewアプリケーションのインストール
このページにアクセスし、お使いのオペレーティングシステムに合わせたインストール手順に従ってください。
ArduSubのメッセージレートを上げる方法
- BlueOSで「Autopilot Parameters(自動操縦パラメータ)」を開きます。
- 検索ボックスに「sr0」と入力し、「SR0_POSITION」と「SR0_EXTRA1」のパラメータを見つけて、両方の値を「50」に設定します。
QGroundControlの設定(使用している場合)
QGroundControlを使用している場合は、車両がメッセージレートを制御できるように設定する必要があります。使用していない場合は、このセクションはスキップしてかまいません。
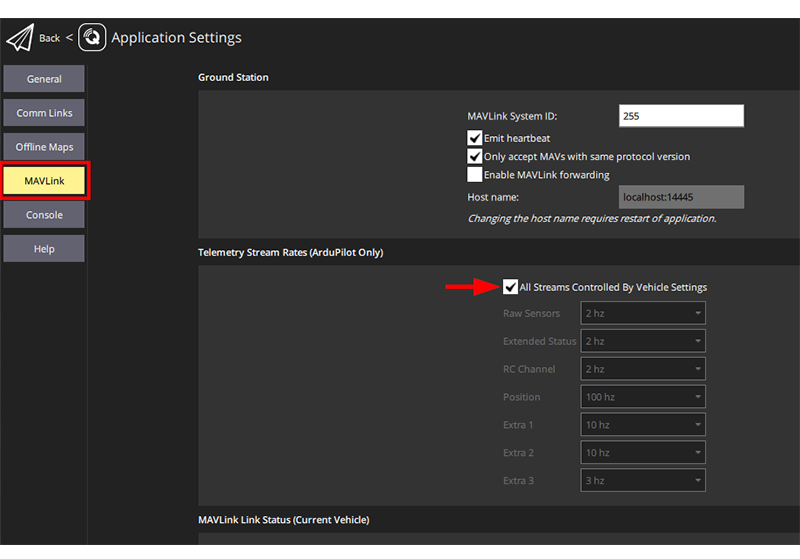
QGroundControlを開き、左上の「Q」アイコンをクリックして「アプリケーション設定」を選択します。
左側のメニューから「MAVLink」を選択し、「All Streams Controlled By Vehicle Settings(すべてのストリームを車両側で制御)」を有効にします。
QGroundControlを再起動します。
単一のOmniscanを使用する
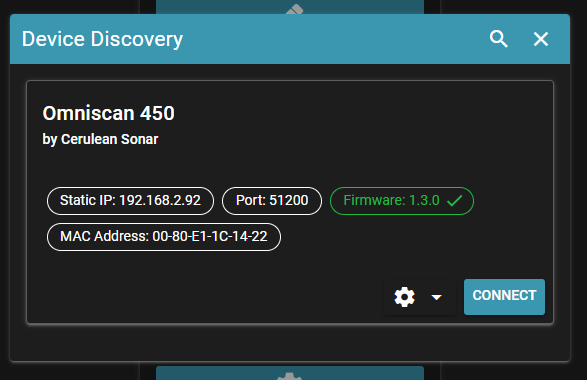
- SonarViewを開き、「Device Discovery(デバイス検出)」をクリックします。
次の画面に、Omniscanが検出されたデバイスとして表示されるので「CONNECT」をクリックして接続します。
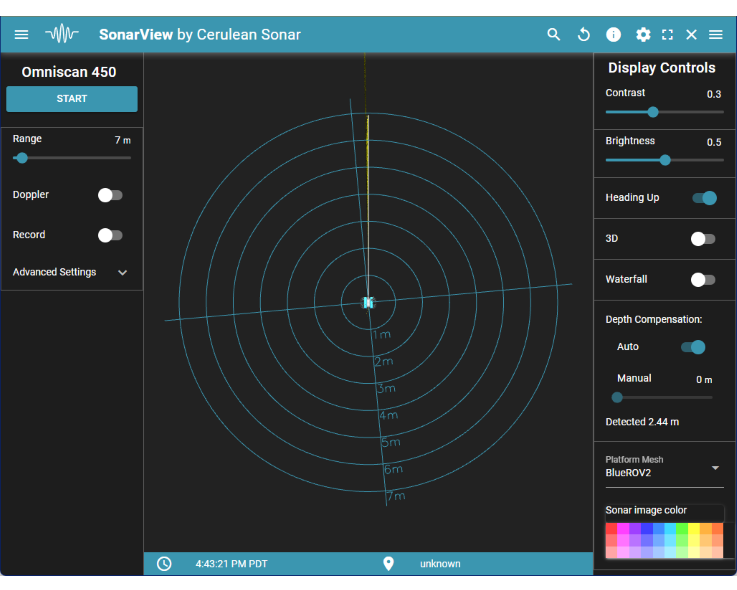
- メイン画面で「START」をクリックしてPingを開始します。
ROVを移動・回転させると、ソナー画像がメイン表示エリアにリアルタイムで表示されます。終了する場合は「STOP」をクリックしてPingを停止します。
 SonarViewは、利用可能な場合にはBlueROV2の方位や位置情報を活用して、より正確な状況認識を提供することができます。手順はこちら
SonarViewは、利用可能な場合にはBlueROV2の方位や位置情報を活用して、より正確な状況認識を提供することができます。手順はこちら
また、SonarViewにはソナー設定や表示オプションなど、多くのカスタマイズ機能も備わっています。詳細については SonarViewのドキュメント をご覧ください。
複数のOmniscanの設定
デフォルトでは、すべてのOmniscanには 「192.168.2.92」 の固定IPアドレスが設定されています。
そのため、使用する前に各Omniscanに固有のIPアドレスを割り当てる必要があります。
【 IPアドレスの設定手順 】
- SonarViewを開き「Device Discovery(デバイス検出)」をクリックします。検出されたデバイスとして、接続されているOmniscanが一覧で表示されます。
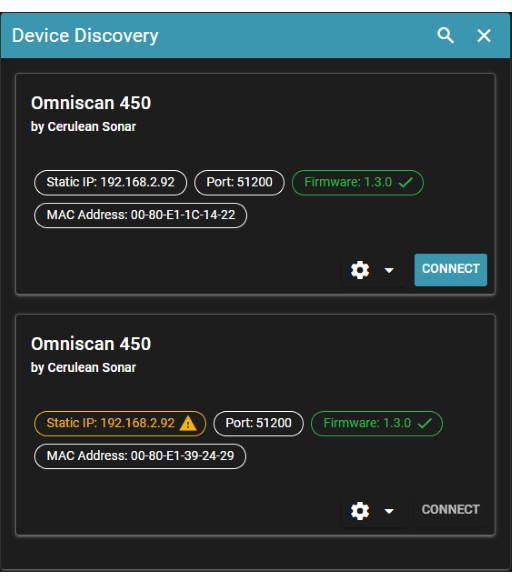
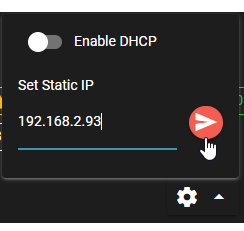
- IPアドレスが重複しているOmniscanの「設定アイコン(歯車マーク)」をクリックし、IPアドレスの最後の数字を変更します。たとえば「192.168.2.93」などに設定し、赤い矢印アイコンをクリックして確定します。他のOmniscanも同様に、それぞれ異なるIPアドレスに設定してください。
- すべてのOmniscanに固有のIPアドレスを割り当てたら、それぞれのデバイスがどの位置にあるかを確認する必要があります。
Device Discovery画面から1台ずつOmniscanに接続して、デバイスが発するクリック音を確認します。「[開始]ボタンをクリックすると、デバイスからカチッという音が鳴るはずです。
また、トランスデューサの表面を軽く指で押すことで、振動を感じる場合もあります。POINT!
どのOmniscanがクリック音を出しているかを確認し、そのIPアドレスとROV上での取り付け位置をメモしておきましょう
セッション設定の作成
すべてのソナーに一意のIPアドレスが割り当てられ、識別できるようになったら、次はセッション設定を行います。
1. セッション設定メニューを開く
- SonarViewのメインメニューから「Session Configurations(セッション設定)」をクリックします。
2. デバイスの追加
- セッション設定画面で 「ADD DEVICE」 をクリックします。
- 次のウィンドウで 「デバイスの検出」 をクリックすると、接続されている各OmniscanとそのIPアドレスが表示されます。
- 一覧から1つ選んで追加します。
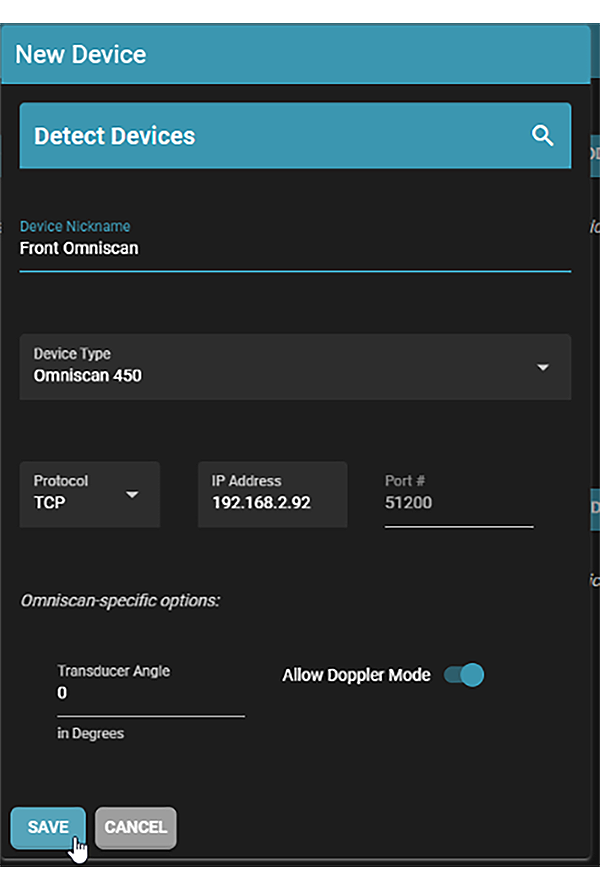
3. デバイスの名前と角度を設定
- 次の画面で、そのOmniscanに名前を付けて区別できるようにします。
- 「Transducer Angle(トランスデューサー角度)」を設定し、ROV上の取り付け位置を反映させます。
【 角度の目安 】
- 前方向き:0度(そのまま)
- 右舷(右向き):90度
- 左舷(左向き):-90度
※どのデバイスがどこにあるかわからない場合は、前のセクション「ステップ3」の方法で確認してください。
そのほかの設定はデフォルトのままでOKです。
入力が終わったら「SAVE」をクリックします。
この手順をすべてのOmniscanに対して繰り返します。
4. 車両(Vehicle)の追加
- 「ADD VEHICLE」 をクリックし、以下の情報を入力します:
- 車両のニックネーム(任意)
- Platform Mesh:「BlueROV2」に設定(SonarView内で正しいモデル表示のため)
- Protocol:「mavlink2rest」に設定
- 入力が完了したら「SAVE」をクリックします。
5. セッションの作成
- 「ADD SESSION」 をクリックして新しいセッションを作成します。
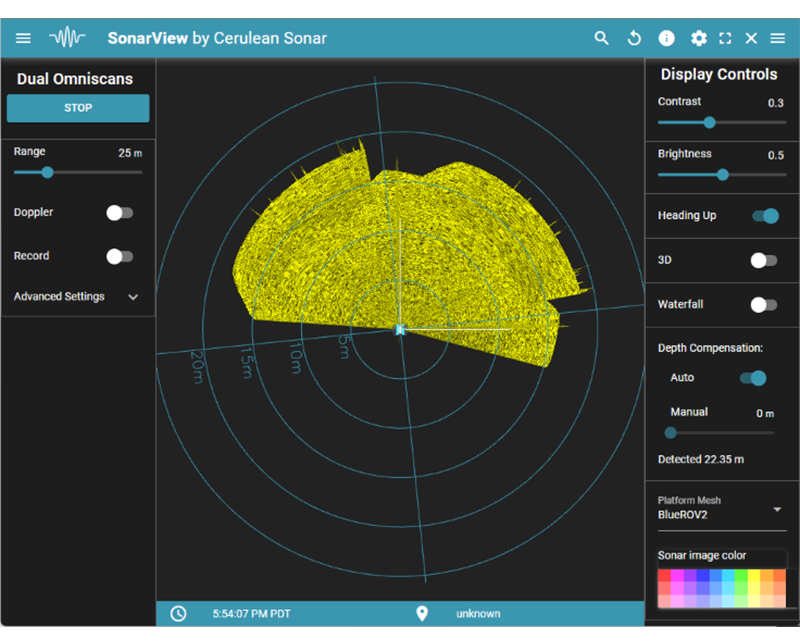
- セッションにわかりやすい名前(例:「Dual Omniscans」など)を付けます。
- ドロップダウンメニューから、BlueROV2とすべてのOmniscanデバイスを追加します。
- 「SAVE」をクリックしてセッションを保存します。
6. セッションの使用
- 作成したセッションはDevice Discovery(デバイス検出)メニューに表示されます。
- セッションの右にある 「接続」ボタンをクリックし、続けて「開始」ボタンをクリックすると、セッションで定義されたすべてのOmniscanが同時に使用可能になります。
補足
複数のOmniscanを使用する場合は、ドップラー設定を有効にすると、SonarViewで2D位置トラッキングが可能になります。
ポイント
SonarViewには、ソナー設定や表示設定のほかにも多くのカスタマイズ機能が備わっていますので、用途に応じて設定してみてください。
フィードバックのお願い
私たちは、ガイド・ソフトウェア・ユーザー体験のすべてにおいて、常に改善に取り組んでいます。本ガイドに関するご意見や改善のご提案がございましたら、お気軽にお知らせください。





{kind=link}