

はじめに
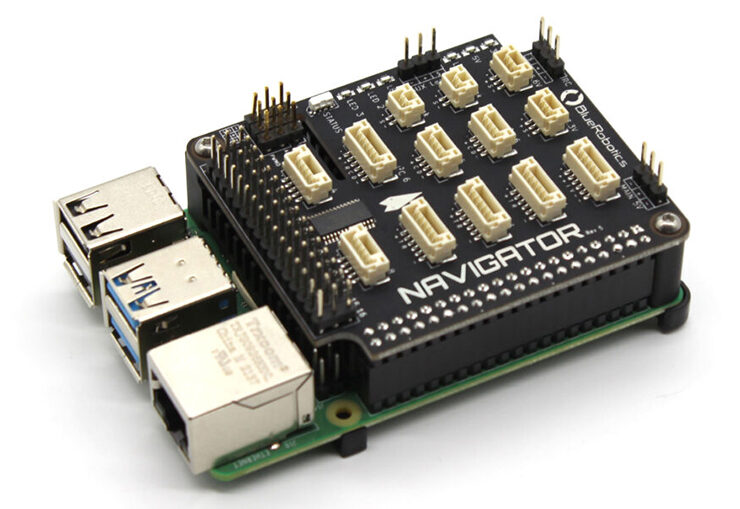
Navigatorは、Raspberry Pi 4用のアドオンボードで、ArduPilotとBlueOSを活用することで自律走行車の実現を可能にします。
このボードには、デジタル加速度計、ジャイロスコープ、デュアル磁力計、ADC(アナログ-デジタルコンバーター)、圧力センサーなど、Raspberry Pi 4を用いた自律走行制御に必要なセンサーが搭載されています。
さらに、サーボ、モーターコントローラー、ソナー、GPS、その他のセンサーや周辺機器を接続するための豊富なコネクターセットも備えています。
Navigatorは、BlueROV2やBlueBoatでBlueOSソフトウェアと組み合わせて使用されますが、ROV(遠隔操作型無人探査機)、USV(無人水上艇)、ドローン、地上車両など、動くものなら何でも幅広いロボットアプリケーションに対応できます!
このガイドでは、Navigatorキットの組み立て方法とハードウェアのセットアップ手順について説明します。
また、このガイドの情報だけでなく、ArduPilotの公式ドキュメントも参考にして、作成する車両の種類に応じた詳細な情報を確認してください。
箱の中身
Navigatorキットに同梱されている部品
- 1 x Navigator PCB
- 1 x Navigatorヒートシンク
- 1 x Raspberry Pi取り付け用スタンドオフ
- 1 x BlueOS 128GB microSDカード
- 3 x 熱伝導パッド
- 2 x アクセサリ/ 拡張用 3ピン JST GHケーブル
- 1 x アクセサリ/ 拡張用 4ピン JST GHケーブル
- 3 x アクセサリ/ 拡張用 6ピン JST GHケーブル
- 2 x SOSリークプローブ(長さ12cm)
- 4 x M2.5×8 ボタンヘッドキャップスクリュー
- 2 x #3-28×3/8 取り付けネジ
※ Raspberry Pi 4はキットに含まれていませんが、別途購入することができます。
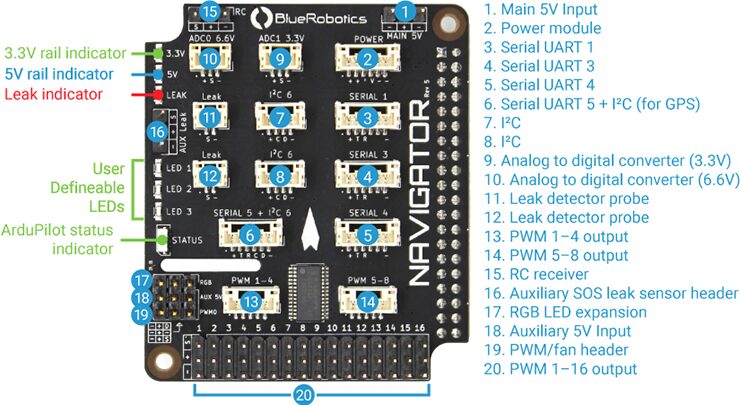
ハードウェアの概要
Navigator PCB回路図(PDFファイル)
すべてのセンサーおよび ICのデータシートは、Navigatorの技術詳細で確認できます。
互換性
Navigatorは以下のRaspberry Piモデルに対応しています。
- Raspberry Pi 4 Model B
Navigatorスタックの組み立て
Navigatorキットには、Raspberry Piに接続するために必要なすべてのコンポーネントとハードウェアが含まれています。
Navigatorスタックを組み立てるのに必要なもの
- Navigator PCB
- Navigatorヒートシンク
- Raspberry Pi 4 Model B
- サーマルパッド
- Raspberry Pi取り付けスタンドオフ
- 4 x M2.5×8 ボタンヘッドキャップネジ
必要な工具
- 1.5 mm 六角ドライバー
RCレシーバーを使用する場合は、組み立てを進める前に、Navigator PCBの背面にあるUART/SBUSジャンパを設定してください。設定手順については、こちらの指示をご参照ください。
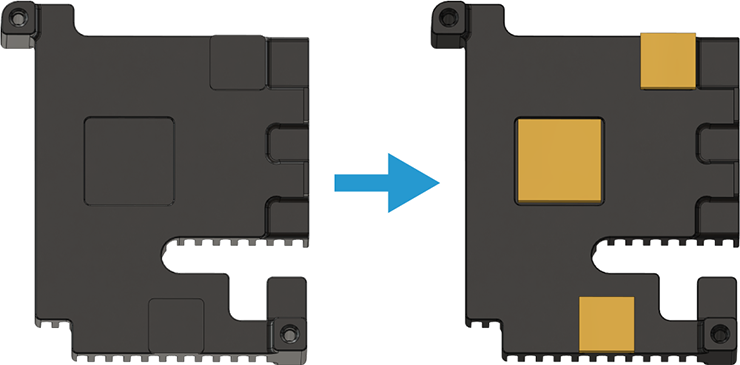
- 四角いサーマルパッドの保護フィルムを剥がし Navigatorヒートシンクの下面に貼り付けます。ヒートシンクには、サーマルパッドを配置する位置を示す四角いマークがあります。
- NavigatorヒートシンクをRaspberry Piの上に置きます。このとき、サーマルパッドはNavigatorヒートシンクとRaspberry Piの間に位置します。
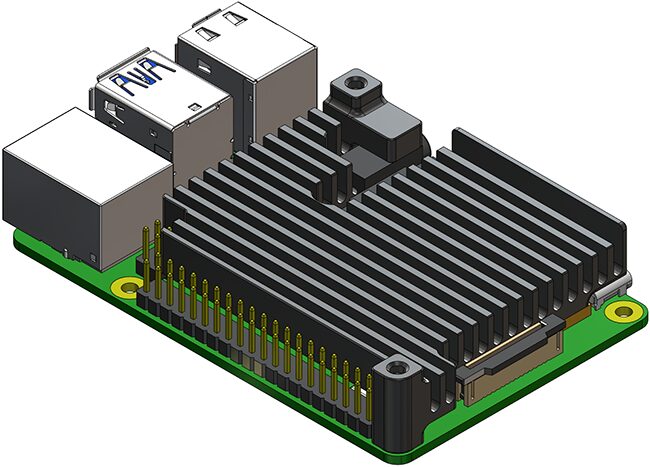
- Raspberry Pi取り付けスタンドオフをRaspberry Piの下側に配置します。M2.5×8ボタンネジ2本と1.5 mm六角ドライバーを使用して、スタンドオフとNavigatorヒートシンクをRaspberry Piに固定します。ネジはスタンドオフの取り付け穴を通し、ヒートシンクにねじ込みます。
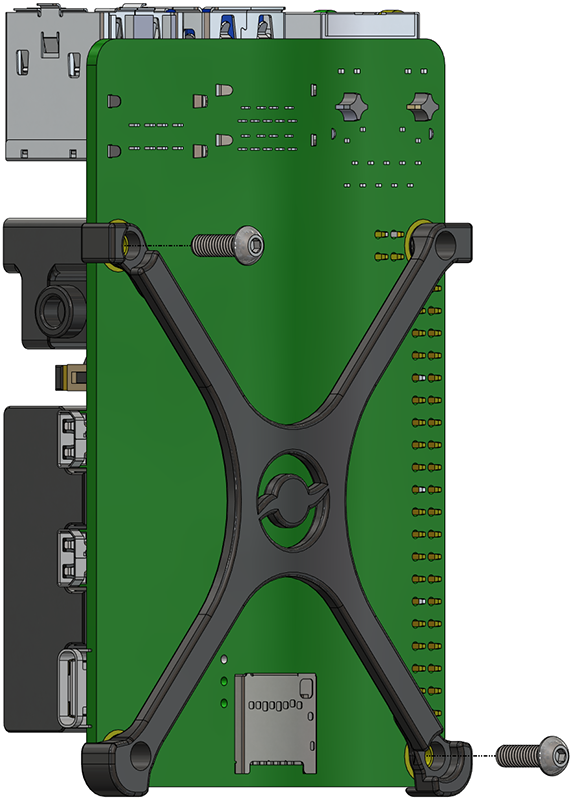
- Navigator PCBをRaspberry Piとヒートシンクの上に置き、Raspberry PiのGPIOピンにしっかり差し込みます。その後、残りのM2.5×8ボタンネジを使ってNavigator PCBをヒートシンクに固定します。
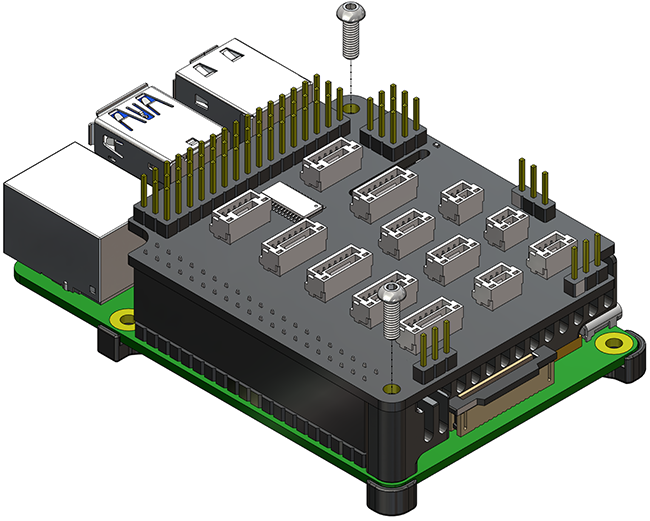 これで、Navigatorスタックを車両に取り付ける準備が整いました!
これで、Navigatorスタックを車両に取り付ける準備が整いました!
取り付け
Navigatorは、付属の#3-28×3/8の成形ネジを使用して車両に取り付けることができます。
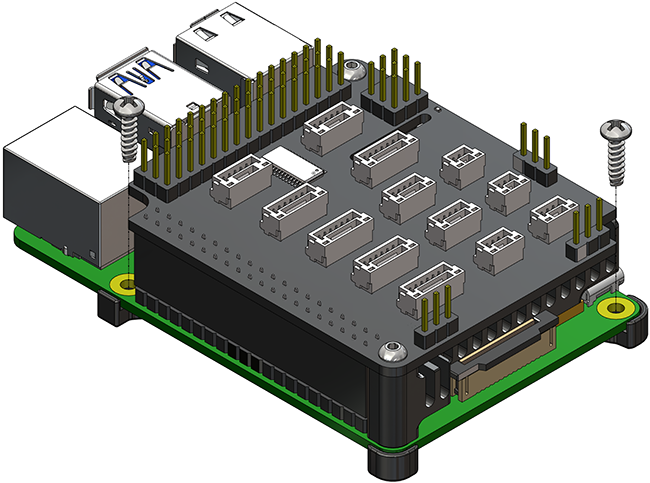 デフォルトの取り付け方向では、Navigator PCBが上向きになり、矢印が車両の前方を指すように配置します。
デフォルトの取り付け方向では、Navigator PCBが上向きになり、矢印が車両の前方を指すように配置します。
 なお、Navigatorスタックは オートパイロットソフトウェアがサポートする他の向きでも取り付け可能です。
なお、Navigatorスタックは オートパイロットソフトウェアがサポートする他の向きでも取り付け可能です。
デフォルトの向きを使用しない場合は、ソフトウェアセットアップガイドのセンサーキャリブレーション手順で、取り付けた向きを指定する必要があります。
電源供給
Navigatorには2つの独立した電源回路があり、メイン回路はプライマリ電源入力とセカンダリ電源入力から給電されます。
もう1つの回路はAUX 5V電源入力から供給されます。下図では、各回路に接続されるポートが示されています。
 Navigatorには2つの電源入力があり、これらはNavigator PCBとRaspberry Piに電力を供給します。いずれの入力にも供給される電圧は5Vから5.35Vの範囲でなければなりません。
Navigatorには2つの電源入力があり、これらはNavigator PCBとRaspberry Piに電力を供給します。いずれの入力にも供給される電圧は5Vから5.35Vの範囲でなければなりません。
また、使用する電源は最低でも4.5Aを供給できる必要があります。どちらの電源入力を使用しても、NavigatorとRaspberry Piに電力が供給されます。
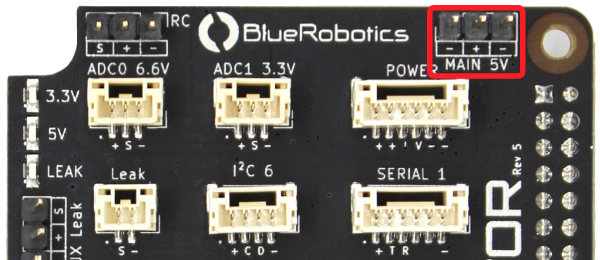
メイン5V(プライマリ)
メイン5V入力はプライマリ電源入力です。この入力は、通常のサーボスタイルの3ポジション0.1インチピッチメスヘッダーに対応しています。
Blue Roboticsの5V 6A電源が推奨されますが、少なくとも4.5Aを供給できる5V UBECであれば問題なく動作します。
ピン配置:
| メイン5V | ||
| コネクタのピン配置 | 1 - GND | GND |
| 2 - Vin | 5 V電源 | |
| 3 - GND | GND | |
| コネクタタイプ | 3ポジション0.1インチピッチオスヘッダーピン | |
| 嵌合コネクタ | 3ポジション0.1インチピッチメスヘッダー | |
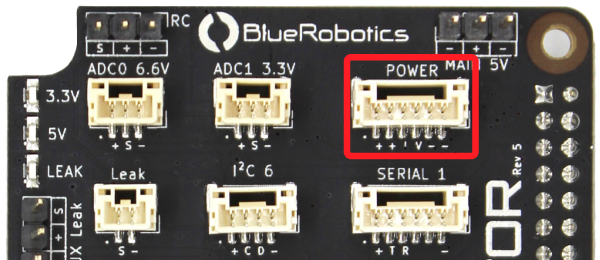
POWER(セカンダリ)
Navigatorは、POWERポートに接続されたパワーモジュールを使用して電力を供給することができます。
また、このポートは、電圧と電流の消費情報を測定し提供するアナログ電源モジュールを接続するためにも使用されます。
 ピン配置:
ピン配置:
| 電源 | ||
| コネクタのピン配置 | 1 - Vin | 5 V電源 |
| 2 - Vin | 5 V電源 | |
| 3 - 電流検出 | 3.3 V | |
| 4 - 電圧検出 | ||
| 5 - GND | 3.3 V、GND | |
| 6 - GND | 、GND | |
| JST GH コネクタタイプ | BM06B-GHS-TBT(LF)(SN)(N) | |
| 相手JST GHプラグと圧着ピン | GHR-06V-S(ハウジング) SSHL-002T-P0.2 (ピン) |
|
Blue Roboticsのパワーセンスモジュールを使用する場合、このモジュールは5V電力を出力しないことに注意してください。このモジュールは、電流と電圧のセンス機能のみを提供します。
電源スイッチング
プライマリのMAIN 5V入力とセカンダリのPOWER入力には、同時に電力を供給することが可能です。この場合、Navigator Stackは、プライマリのMAIN 5V入力の電圧が4.7Vを下回らない限り、プライマリ入力から電力を供給します。
プライマリ入力電圧が4.7V未満になると、NavigatorはセカンダリのPOWER入力から電力を供給するように切り替わります。そして、プライマリ入力電圧が5.1V以上に戻ると、再びプライマリ入力から電力を供給します。
入力切り替えが頻繁に発生するのを防ぐために、少なくとも4.5Aを供給できる電源を使用することをお勧めします。
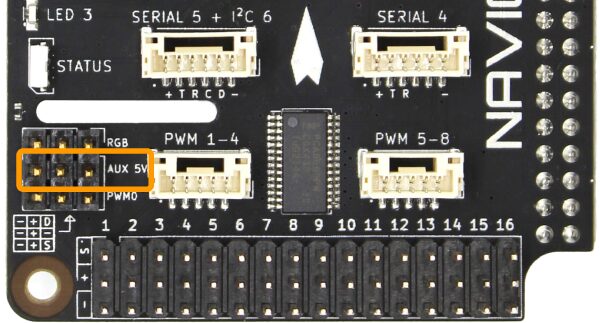
補助電源入力
AUX 5V入力は、サーボレール、RGBヘッダー、およびPWM0ヘッダーに電力を供給します。これらの出力に接続されたサーボやその他のデバイスに電力を供給するためには、AUX 5V入力に適切な電源を接続する必要があります。
AUX 5V入力に接続された電圧は、サーボレール、RGBヘッダー、PWM0ヘッダーに接続されたすべてのデバイスにそのまま供給されます。
そのため、これらのデバイスの入力電圧範囲が、供給される電圧に適合していることを必ず確認してください。
Blue Robotics 5V6A電源は、MAIN 5V入力とAUX 5V入力の両方に接続可能なデュアル電源出力コネクタを備えています。
ピン配置:
| AUXの5V | ||
| コネクタのピン配置 | 1 - GND | GND |
| 2 - Vin | 5 V 補助電源 | |
| 3 - GND | GND | |
| コネクタタイプ | 3ポジション 0.1インチピッチ オスヘッダピン | |
| 嵌合コネクタ | 3ポジション 0.1インチピッチ メスヘッダ | |
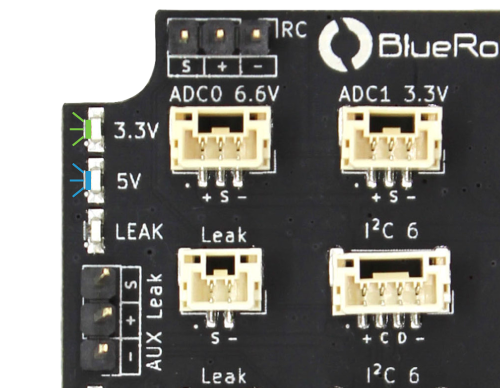
電源インジケータLED
Navigatorには、電源ステータスを表示する2つのインジケータLEDがあります。
- 5V LED
Navigatorボードが電力を受け取っていることを示します。 - 3.3V LED
Navigatorボードがオンボード電子機器に電力を供給していることを示します。
サーボとESC
サーボレールへの電源供給
プライマリのMAIN 5V入力およびセカンダリのPOWER入力は、サーボレールに電力を供給しません。そのため、AUX 5V入力を使用して個別に電源を供給する必要があります。
また、PWM出力チャンネルにBEC(Battery Eliminator Circuit)を接続して電源を供給することも可能です。
AUX 5V入力またはサーボレールに接続された入力電圧は、以下のすべてのデバイスに供給されます。
- サーボレール
- RGBヘッダー
- PWM0ヘッダー
これらのデバイスの入力電圧範囲が、供給される電圧に適合していることを必ず確認してください。
ココに注意
複数のBECをサーボレールまたはAUX 5V入力に接続しないでください。
これは過電流や回路の故障を引き起こす可能性があります。
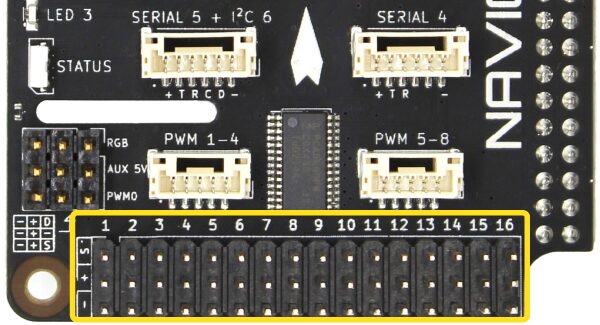
サーボレール/PWM出力
ESCやサーボはPWM出力1~16に接続可能です。また、リレーやスイッチなどを制御するための3.3Vデジタル出力としても設定できます。
なお、各信号ピンで使用できる最大電流は15mAです。
リレーをサポートするには、ArduSubの場合はバージョン4.1.1以上、その他のArduPilotファームウェアではバージョン4.4.0以上が必要です。
ピン配置:
| PWM 1–16 | ||
| コネクタのピン配置 | 1 - PWM信号 | 3.3 V |
| 2 - V (Aux) | V (補助) | |
| 3 - GND | GND | |
| 最大信号電流 | 15 mA | |
| コネクタタイプ | 3ポジション、0.1インチピッチのオスヘッダピン | |
| 嵌合コネクタ | 3ポジション、0.1インチピッチのメスヘッダ | |
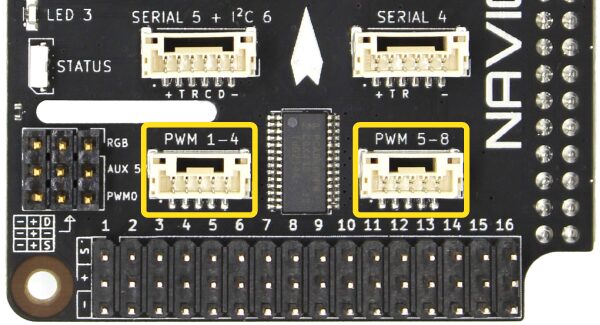
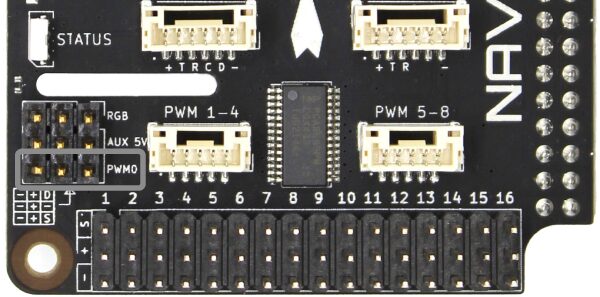
JST GH PWMコネクタ
PWM出力チャンネル1~8は、サーボレール上部に配置されたJST GHコネクタからも利用できます。
これらのPWM信号は、JST GHコネクタとサーボレールの両方に接続されており、両方のコネクタに同じ信号が出力されます。
JST GHコネクタは、特に4-in-1 ESCの配線など、スペースに制約があるアプリケーションで高密度な配線を可能にする設計となっています。
ピン配置:
| PWM 1-4 | ||
| コネクタのピン配置 | 1 - PWM01 | 3.3 V |
| 2 - PWM02 | 3.3 V | |
| 3 - PWM03 | 3.3 V | |
| 4 - PWM04 | 3.3 V | |
| 5 - GND | GND | |
| 最大信号電流 | 15 mA | |
| ST GHコネクタタイプ | BM05B-GHS-TBT(LF)(SN)(N) | |
| JST GHプラグとクリンプピンの嵌合 | ハウジング : GHR-05V-S ピン : SSHL-002T-P0.2 |
|
| PWM 5-8 | ||
| コネクタのピン配置 | 1 - PWM05 | 3.3 V |
| 2 - PWM06 | 3.3 V | |
| 3 - PWM07 | 3.3 V | |
| 4 - PWM08 | 3.3 V | |
| 5 - GND | GND | |
| 最大信号電流 | 15 mA | |
| ST GHコネクタタイプ | BM05B-GHS-TBT(LF)(SN)(N) | |
| JST GHプラグとクリンプピンの嵌合 | ハウジング : GHR-05V-S ピン : SSHL-002T-P0.2 |
|
RCラジオ
RC無線機はRC入力コネクタに接続可能です。
RCプロトコルには、反転タイプと非反転タイプの両方が対応しています。

ピン配置:
| ラジコン | ||
| コネクタのピン配置 | 1 - シリアル | 3.3V |
| 2 - VCC | 5 V電源 | |
| 3 - GND | GND | |
| コネクタタイプ | 3ポジション0.1インチピッチオスヘッダーピン | |
| 嵌合コネクタ | 3ポジション0.1インチピッチメスヘッダー | |
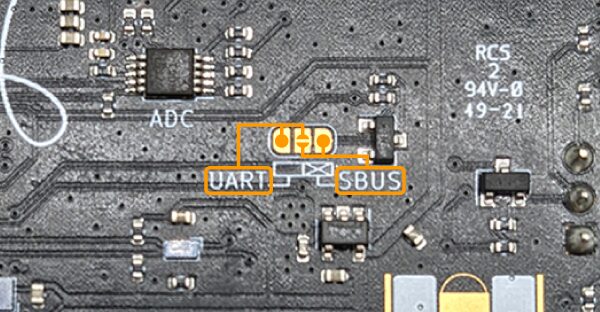
UART/SBUS ジャンパー
デフォルト設定では、RC入力はSBUS(反転)プロトコルに対応しています。
非反転のUART信号を使用する無線機を接続する場合、以下の手順を行います。
- トレースの切断
SBUSと中央のはんだパッドをつなぐトレースを切断します。 - ジャンパ設定の変更
Navigator PCB背面のジャンパを、UARTの位置にはんだ付けします。
再びRC入力をSBUS用に設定する場合は、トレース切断後にジャンパをSBUSの位置にはんだ付けしてください。
RCシリアルプロトコルとジャンパ構成
以下の表は、一般的なRCシリアルプロトコルと それに対応するジャンパ構成を示しています。
| メーカー | シリアルプロトコル | UART信号 | ジャンパ位置 |
|---|---|---|---|
| FRSky | SBUS | 反転 | SBUS(デフォルト) |
| FRSky | IBUS | 非反転 | UART |
| チームBlackSheep | Crossfire | 非反転 | UART |
シリアル機器
シリアルデバイスは、6ピンシリアルコネクタ(SERIAL 1, 3, 4, 5)に接続できます。
さらに、追加のシリアルデバイスは、USB-UARTアダプタ(例:BLUART)を使用して、Raspberry Pi 4のUSBポートに接続することが可能です。
ピン配置:
| シリアル 1、シリアル 3、シリアル 4 | ||
|
Blue Robotics コネクタ標準リファレンス |
||
| コネクタのピン配置 | 1 - VCC | 5 V |
| 2 - TX (出力) | 3.3 V | |
| 3 - RX (入力) | 3.3 V | |
| 4 - Empty | ||
| 5 - Empty | ||
| 6 - GND | GND | |
| インターフェイス | UART(アールト) | |
| シリアル 1 パス | /dev/ttyS0 | |
| シリアル 3 パス | /dev/ttyAMA1 | |
| シリアル 4 パス | /dev/ttyAMA2 | |
| シリアル 1 ボー レート | 1200 BD - 2 MBd | |
| シリアル 3、シリアル 4 ボー レート | 1200 BD - 3 MBd | |
| 最大出力 | 1 A | |
| JST GHコネクタタイプ | BM06B-GHS-TBT(LF)(SN)(N) | |
| JST GHプラグとクリンプピンの嵌合 | ハウジング : GHR-06V-S ピン : SSHL-002T-P0.2 |
|
テレメトリー無線
テレメトリー無線は、6ピンシリアルコネクタのいずれにも接続可能です。
推奨される設定は、テレメトリー無線接続にSERIAL 1を使用することです。
GPS
シリアルGPSモジュールは、いずれの6ピンシリアルコネクタにも接続できます。
Dronecode互換GPSモジュールの中には、コンパスや気圧計などのオンボードI2Cデバイスを搭載しているものもあります。
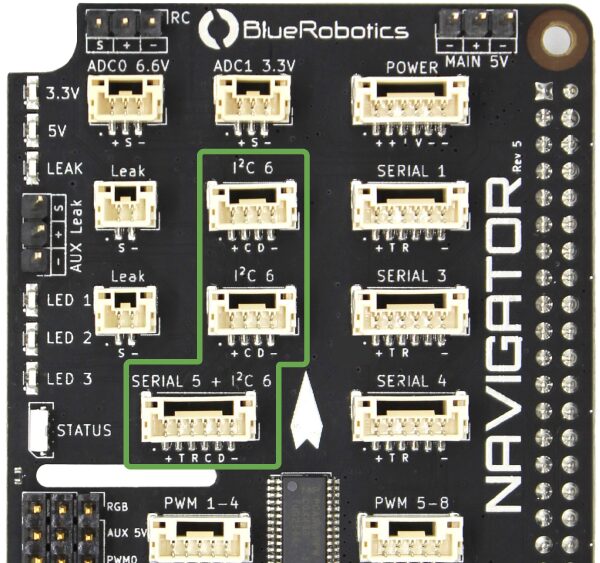
ココがポイント
これらのI2Cデバイスを使用するには、GPSモジュールをSERIAL 5 + I2C 6コネクタに接続する必要があります。
ピン配置:
| シリアル 5 + I2C 6 | ||
| コネクタのピン配置 | 1 - VCC | 5 V |
| 2 - TX (UART出力) | 3.3 V | |
| 3 - RX (UART入力) | 3.3 V | |
| 4 - SCL (I2C) | 3.3 V | |
| 5 - SDA (I2C) | 3.3 V | |
| 6 - GND | GND | |
| インターフェイス | UART(アールト)+ I2C | |
| UARTパス | /dev/ttyAMA3 | |
| I2Cパス | /dev/i2c-6 | |
| UART ボーレート | 1200 Bd–3 MBd | |
| I2C ボーレート | 10 kHz –1 MHz | |
| 最大出力 | 1 A | |
| JST GHコネクタタイプ | BM06B-GHS-TBT(LF)(SN)(N) | |
| JST GHプラグとクリンプピンの嵌合 | ハウジング : GHR-06V-S ピン : SSHL-002T-P0.2 |
|
I2Cデバイス
I2Cセンサーは、I2C 6ポートに接続する必要があります。I2Cバスは、SERIAL 5 + I2CコネクタのSCLピンとSDAピンからもアクセス可能です。
I2Cコネクタのクロックラインとデータラインは並列に接続され、Raspberry Pi 4 SOC I2C 6ユニットに接続されます。
外部プルアップ抵抗はオプションであり、Navigator PCBには既にプルアップ抵抗が搭載されています。
ピン配置:
| シリアル 5 + I2C 6 | ||
|
Blue Robotics コネクタ標準リファレンス |
||
| コネクタのピン配置 | 1 - VCC | 5 V |
| 2 - SCL | 3.3 V | |
| 3 - SDA | 3.3 V | |
| 4 - GND | GND | |
| インターフェイス | I2C | |
| パス | /dev/ttyAMA3 | |
| ボーレート | 10 kHz – 1 MHz | |
| 最大出力 | 1 A | |
| JST GHコネクタタイプ | BM04B-GHS-TBT(LF)(SN)(N) | |
| JST GHプラグとクリンプピンの嵌合 | ハウジング : GHR-04V-S ピン : SSHL-002T-P0.2 |
|
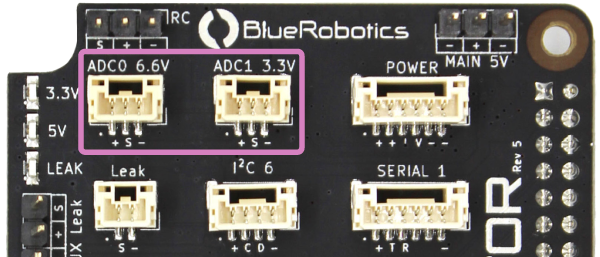
アナログ・デバイス
アナログ・デジタル変換器(ADC)のコネクタは2つあり、1つは0-3.3V信号入力、もう1つは0-6.6V信号入力です。
ココに注意
これらのコネクタに印加される信号電圧が、指定された許容範囲内であることを確認してください。これらの制限を超えると、ADCが永久的に損傷する可能性があります。
ピン配置:
| ADC0 6.6V | ||
| コネクタのピン配置 | 1 - VCC | 5 V |
| 2 - 信号 | 0–6.6 V アナログ入力 | |
| 3 - GND | GND | |
| JST GHコネクタタイプ | BM03B-GHS-TBT(LF)(SN)(N) | |
| JST GHプラグとクリンプピンの嵌合 | ハウジング : GHR-03V-S ピン : GHR-03V-S |
|
| ADC1 3.3V | ||
| コネクタのピン配置 | 1 - VCC | 5 V |
| 2 - 信号 | 0–3.3 V アナログ入力 | |
| 3 - GND | GND | |
| JST GHコネクタタイプ | BM03B-GHS-TBT(LF)(SN)(N) | |
| JST GHプラグとクリンプピンの嵌合 | ハウジング : GHR-03V-S ピン : SSHL-002T-P0.2 |
|
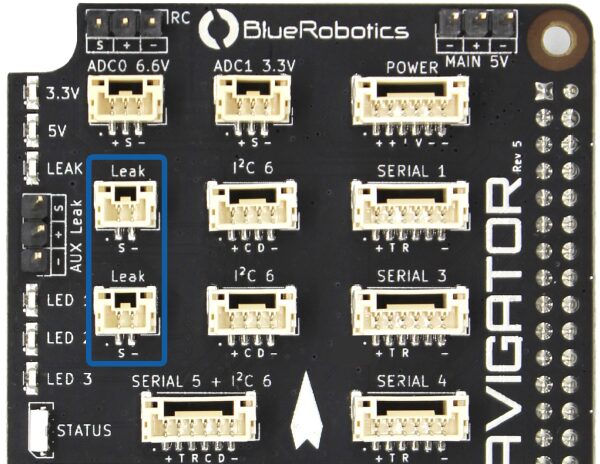
漏水検知
Navigatorには、車両内の水の浸入を検知するためのリーク検出回路が内蔵されています。
リークポートを使用して、2つのリーク検出プローブをNavigatorに直接接続することができます。
ピン配置:
| 漏る | ||
| コネクタのピン配置 | 2 - 信号 | 5Vプルアップ |
| 3 - GND | GND | |
| JST GHコネクタタイプ | BM03B-GHS-TBT(LF)(SN)(N) | |
| JST GHプラグとクリンプピンの嵌合 | ハウジング : GHR-02V-S ピン : SSHL-002T-P0.2 |
|
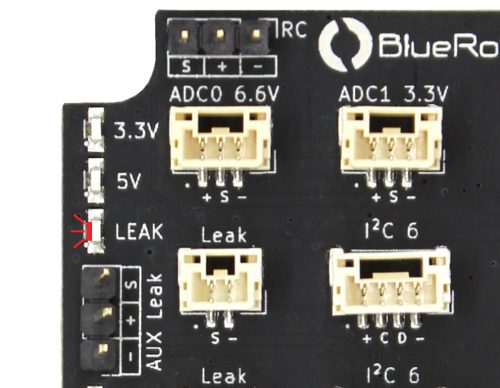
ココがポイント
いずれかのプローブで漏れが検出されると、LEAKインジケータLEDが赤色に点灯し、ソフトウェアでフェイルセーフ警告が作動します。
追加のプローブが必要な場合は、SOSリークセンサーをAUXリークヘッダーに接続することができます。

ピン配置:
| AUXリーク | ||
| コネクタのピン配置 | 1 - 信号 | 5 V |
| 2 - VCC | 5 V | |
| 3 - GND | GND | |
| コネクタタイプ | 3ポジション 0.1インチピッチ オスヘッダーピン | |
| 嵌合コネクタ | 3ポジション 0.1インチピッチ メスヘッダー | |
交換用リークプローブはこちらから入手できます。
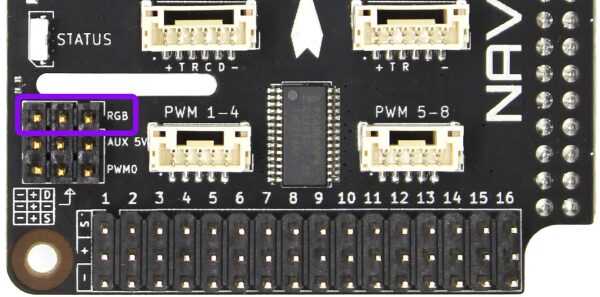
RGB LEDヘッダー
RGB LEDヘッダーは、WS2812またはSK6812 LEDを使用したアドレス指定可能なLEDストリップ 通称「NeoPixels」の接続をサポートします。
RGB LEDコネクタは、AUX 5V電源入力で動作します。
ピン配置:
| RGB | ||
| コネクタのピン配置 | 1 - データ | 5 V |
| 2 - V (Aux) | V(補助) | |
| 3 - GND | GND | |
| コネクタタイプ | 3ポジション 0.1インチピッチ オスヘッダーピン | |
| 嵌合コネクタ | 3ポジション 0.1インチピッチ メスヘッダー | |
PWM0/ファンヘッダー
PWM0コネクタは、冷却用ファンを制御するためのコネクタです。
PCA9685 PWMドライバに接続されるサーボレールのPWM1-16コネクタとは異なり、このコネクタのPWMピンは、Raspberry Pi 4 SOCのGPIO18ピンに直接接続され、Raspberry Pi SOCのPWM0出力信号として機能します。
このピンは、ユーザー・アプリケーション・コードにおいて、汎用入出力(GPIO)やPWM機能として使用することも可能です。
ピン配置:
| PWM0 | ||
| コネクタのピン配置 | 1 - PWM0 | 3.3 V |
| 2 - V (Aux) | V(補助) | |
| 3 - GND | GND | |
| コネクタタイプ | 3ポジション 0.1インチピッチ オスヘッダーピン | |
| 嵌合コネクタ | 3ポジション 0.1インチピッチ メスヘッダー | |
カメラ
BlueOSは、Blue RoboticsのLow-Light HD USB Cameraのような、H.264エンコードされたビデオストリームを持つUSBカメラをサポートしています。
USBカメラをRaspberry PiのUSBポートに接続すると、初回起動時にBlueOSがカメラストリームを自動的に設定します。
カメラとビデオストリームの設定は、BlueOSのウェブインターフェースから管理することができます。詳細については、BlueOSのドキュメントをご参照ください。
ココがおすすめ
Raspberry Piカメラのサポートは間もなく開始される予定ですが、現時点ではサポートされていません。BlueOSにおけるRaspberry Piカメラのサポート状況については、こちらをご覧ください。





{kind=link}