水中ドローンRov-Fun

2024/4/28
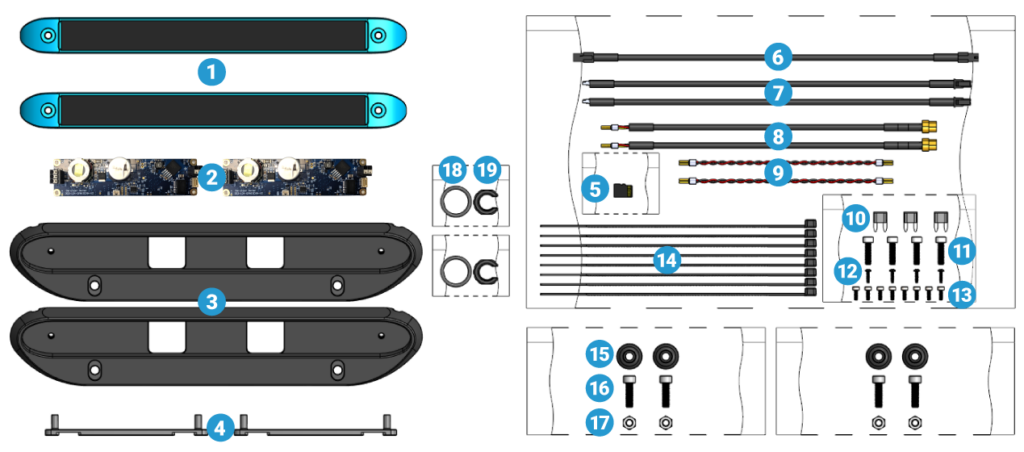
Cerulean Omniscan 450 SSはBlueBoatとシームレスに統合され、サイドスキャンソナーイメージングを通じて水中の物体を特定し識別することで、海底の地図作成を支援します。このガイドでは、BlueBoatへの取付方法について説明します。 キットの内容 2 x Cerulean Omniscan 450 SS トランスデューサー 2 x セルリアン オムニスキャン 450 SS PCB 2 x アルミニウムトランスデューサーブラケット 2 x アルミニウム PCB スタンドオフ Blue ...

2024/4/27
T200およびT500は、高出力ROV、水上船舶、AUV、およびカヤックのような人を乗せる用途など、多くの用途で頑丈、強力、かつ柔軟に使用できるように設計された水中スラスターです。 本記事では、T200またはT500スラスタの操作、サービス、およびトラブルシューティングの方法を説明しますので、ぜひ参考にしてください。 T500スラスター T200スラスター なお、安全に利用する上で、以下の点には十分注意してください。 水中で電気を扱うときは常に注意する ケガを避けるため、体の一部をスラスターのインレットと ...
2024/2/18
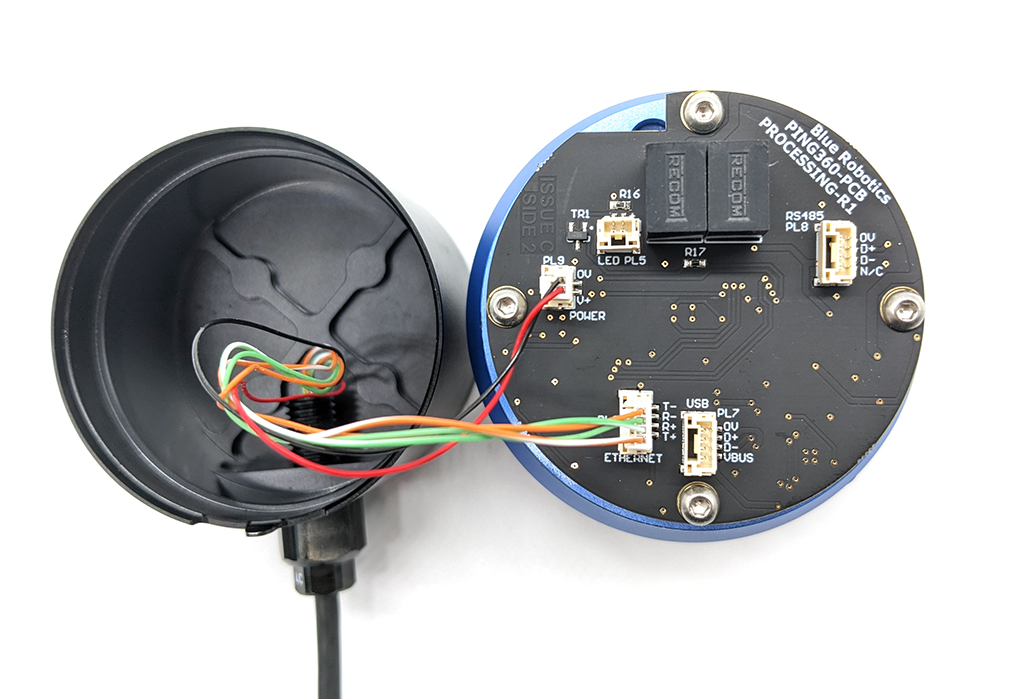
Ping360ソナーは、メカニカル・スキャニング・ソナーです。 ロープ、壁、ドックの杭、岩、難破船、ボートなど、音波を反射する構造物や物体からのエコーを見ることができます。 これにより、水の見え方に関係なく、航行するための基準点を得ることができ、水中の重要な特徴を素早く見つけられるでしょう。 Ping360のユニークな特徴の一つは、いくつかの配線を変更することで、ユーザーが設定可能な通信インターフェイスの種類を持つ能力です。 本記事では、Ping360をUSB、RS-485、またはイーサネット通信用に設定 ...

2024/4/28
当社の新世代防水エンクロージャーは、ロックコードでエンドキャップをチューブに固定し、不用意に外れるのを防ぎます。 しかし、このようなセキュリティの強化は、チューブ内に過度な圧力がかかるのは危険な状況という意味です。 圧力開放弁(PRV)は、水密エンクロージャー内で発生する可能性のある内圧が12±3psiに達すると、自動的に安全に開放されるように設計されています。 そこで本記事では、PRVを防水エンクロージャーに取り付ける方法と、関連アクセサリーの使用方法について説明します。 安全性について 圧力開放弁(P ...

2024/4/28
WetLinkペネトレーター(WLP)は、当社製品に使用されている多種多様なケーブルのシーリングを可能にします。 WLPは非常に便利なので、お客様のプロジェクト用に、直径3.7~9.8 mmのケーブルをカバーするWLPサイズを取り揃えています。 このページの翻訳記事です 本記事では、製品ラインがどのように機能するのか、技術仕様表を使ってケーブルに適したWLPサイズを選ぶ方法、そして漏れがないことを確認するために組み立て中と組み立て後にチェックすべき点について説明します。 当社のこれまでのテス ...
2024/2/17
Blue Robotics Ping Echosounder and Altimeterは、水中の物体までの距離を測定する水中ソナーです。 このページの翻訳記事です メモ 航続距離100メートル、ビーム幅25度、水深300メートル。 ROVやAUVの高度計として、USVやボートの水深調査、あるいは海洋ロボットの障害物回避ソナーとして使用できます。 本記事では、ソナーの一般的な操作方法と、Ping Viewerソナーインターフェースの使用方法について説明します。 ・Ping2 Soner Altimeter ...
2024/4/28
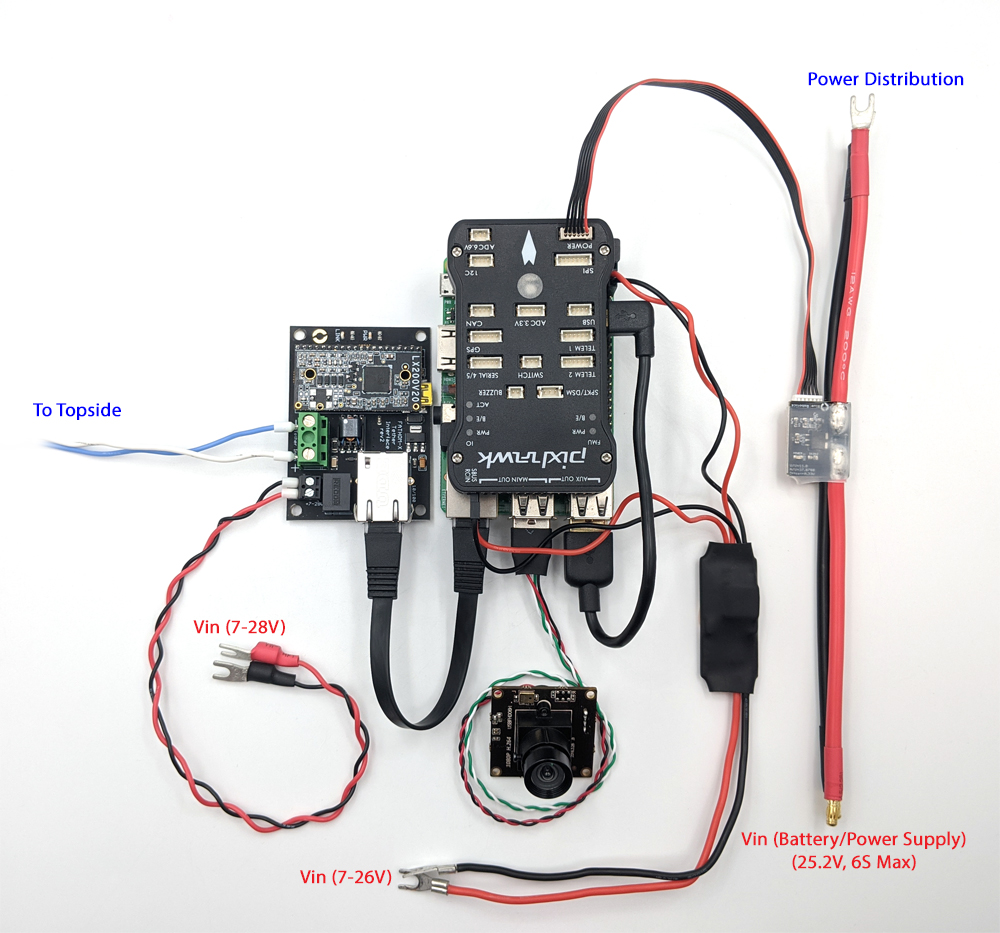
アドバンストROVエレクトロニクスパッケージは、ROVに必要なすべての電子装置をArduSubを搭載して提供します。 本記事では、アドバンスドROVへの接続方法と組み立て方法を説明しますので、ぜひ参考にしてください。 なお、ハードウェアとソフトウェアがどのように連動するかについては、ArduSubのドキュメントをご覧ください。 パーツおよびツール 必要なもの(キットには含まれていません) ROVと地上のコンピュータとの通信用に、少なくとも2本のワイヤーを備えたケーブル(テザー、ネットワークケーブル、または ...

2024/2/17
WetLinkペネトレータ(WLP)は、組み立てが簡単で、接着剤、ポッティングコンパウンド、ゴム成形を必要としません。 WLP組立ツールまたは一般的なハンドツールを使用して、ウェットリンクペネトレータを組み立てる方法をご紹介します。 ケーブルの下地処理 組み立ての前に、ケーブルのジャケットを剥く必要があります。 ブルーロボティクスのケーブルの剥き方については、ケーブルジャケット剥き方のチュートリアルをご覧ください。 ケーブルを剥く際には、ケーブルジャケットの切り口が、ケーブルに対して垂直に真っ直ぐであるこ ...

2024/4/28
BlueBoatの操作を円滑に行うためには、ソフトウェアおよびネットワークの設定が必要です。 そこで本記事では、BlueBoatのソフトウェアやネットワーク、コントローラーなどのセットアップについて、詳しく解説します。 設定前に必要な準備 BlueBoatのソフトウェア設定には、BlueBoatとBaseStationのペアリング、コンピューターのBaseStationへの接続、QGroundControlのインストール、センサーの調整が含まれます。 また、BlueBoatを操作するには以下のOS搭載され ...

2024/4/28
BlueROV2に使われているESCの交換方法を解説します。 ESCを交換するにはまずは4インチのエンクロージャーを取り外す必要があります。 取り外し方法はこちらを参考にしてください。 エンクロージャーを外すとBlueROV2の電子部品が現れます。 ESCの配線は下記の通りです。 青 出力 A 緑 出力 B 白 出力 C 白 シグナル(PWM) 黒 グランド 赤 +(7-26V) 黒 グランド ESCを取り外すには、上記すべての配線を機体から外します。出力線(青、緑、白)は端子台に接続されていますので、マ ...

2024/4/28
BlueROV2の制御等の部品はすべて4インチのエンクロージャー内に収められています。 ですので、スラスターの調子が悪いからESCを見てみようとか、中の配線が外れいているという場合はこのエンクロージャーを外して作業をします。 エンクロージャーはフレームと4本のM3×16mmのネジで止まっているだけなので、簡単に外すことができます。 では、作業を順番に解説します。 エンクロージャーをフレームから外す エンクロージャーをフレームに止めている4本のネジM3×16mmを外していきます。ネジは前後2本ずつついていま ...
2023/8/2
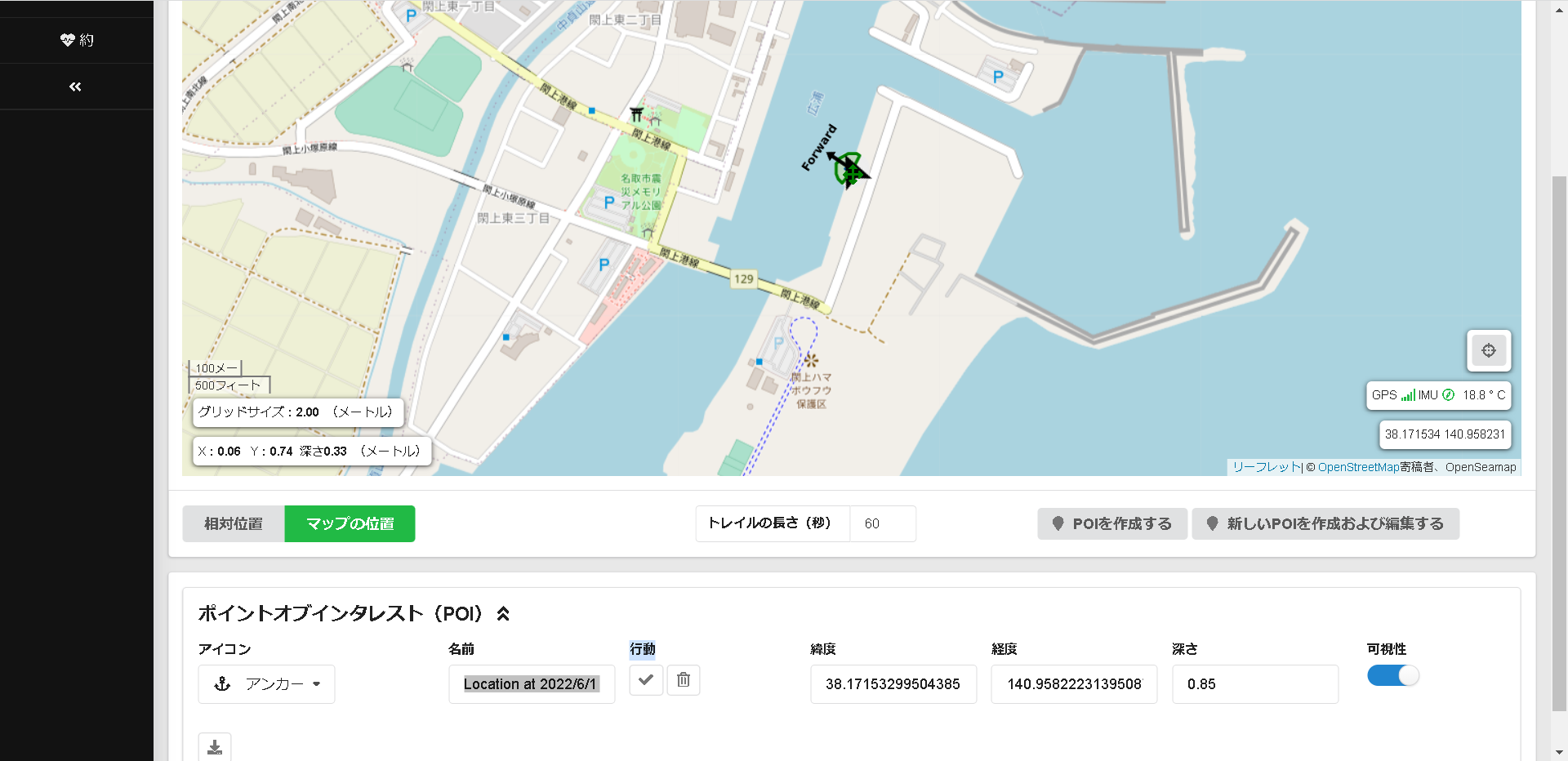
アンテナの組立 アンテナを広げ、折りたたみジョイントのラッチを使用してまっすぐにロックします。 電源ケーブルをボックスに接続 赤丸の部分にコネクターを差し込み、半回転させることでロックされます。 電源ケーブルにはバッテリーをつなぎます。 テザーインターフェースとアンテナのケーブルをボックスに接続 ケースの電源ケーブルと逆側にアンテナとテザーインターフェースにつないだケーブルを接続します。 配線の接続はこれで完了です。 設定 運用するパソコンにIPアドレス 192.168.2.94を設定します。BlueRO ...

2024/4/28
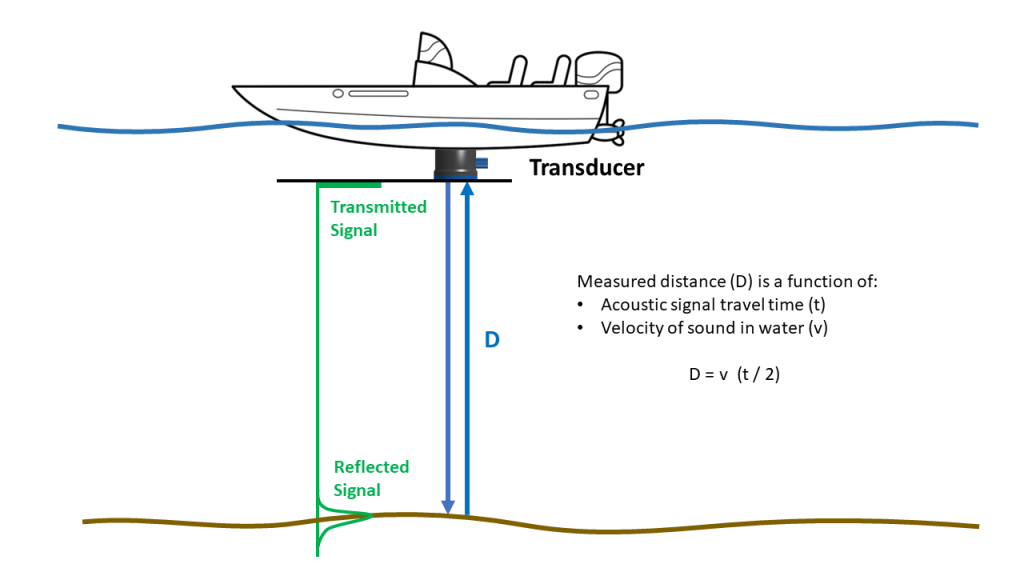
スキャニングソナーの音響画像を理解するために画像の見方やROV搭載時のテクニックをご紹介します。 参考画像ではPing360とBlueROV2を使用していますが、他のスキャニングソナーとROVの組み合わせでもほぼ同様です。 参考メーカーサイト 動作原理 スキャニングソナーの詳しい説明はこちらでも紹介したとおり、音響ビームを放ち、エコーを記録して物体や空間を認識する商品です。 音速と物体までの距離 水中での既知の音速とエコーを受信した時刻を組み合わせることで、対象までの距離を計算することができます。 距離 ...

2023/1/22
水中ドローンBlueROV2を運用する間に、必ず行わなければならないのが真空テストです。これは4インチの電子エンクロージャー内と3インチのバッテリーエンクロージャー内の空気を一定数値抜き、15分放置し漏れを調べるものです。メーカーから発売されているポンプが新しくなったのでそれの使い方を解説します。 Mityvac手動真空ポンプ このポンプはPRESSUREとVACUUMの切り替えがあります。 真空ポンプの側面にあるノブを回して、「VACUUM」設定にします。 バキュームプラグの1つをバッテリーエンクロージ ...
2023/1/22
通信機器に割り当てられるIPアドレスやサブネットマスクについて解説します。 MACアドレスとは MACアドレス(Media Access Control address)とはネットワークにつながるすべての機器に割り当てられている識別番号です。 下図のとおり「ベンダ識別子」「ベンダ内管理番号」からなり、0~Fの16進数で表されます。このアドレスは世界で唯一の番号です。 IPアドレスとは IPアドレス(Internet Protocol Address)もコンピュータが通信相手を特定するという意味において、M ...

2023/1/22
テスターは1台で、電圧や抵抗、電流などが測れる便利な計測器です。測定値がアナログの針で数字を示すタイプと、デジタル表示のタイプがあります。 1台で何役もこなす便利なテスターです。しかし、間違えた使い方をすると、テスターが故障するだけでなく、電気設備や取り扱い者がケガをする恐れもあります。 今回は、現場でよく使われるHIOKIのカードハイテスタ3224-60を例に取り扱いを説明します。 テスターの各部名称 本体とプラスとマイナスのテストリード、これはどのテスターでも共通です。HIOKI 3324-60はデジ ...

2024/5/2
ドームエンドキャップの赤丸の部分のネジをすべて外します。 これでドームエンドキャップが外れます。フランジとの間にOリングがありますので、それも外します。 ゴミや髪の毛が付着しないようにきれいに再度グリスを付けてOリングを取り付けます。 新しいドームエンドキャップを取り付け、取り外したネジを対角線上に均等に締めます。一度に強く締めるのではなく、何回かに分けて徐々に占めてください。 強く締めすぎるとドームエンドキャップが内部で割れ浸水の原因にもなりますのでご注意ください。

2023/1/22
※すべてのネジにはネジロック材を1滴たらし均等に広げてください。 標準バージョンの場合、2.5 mm六角ドライバーで2本のM4x10ネジを使用して、各フレーム脚の下部に2本のゴム製脚を取り付けます。2つの同じものを組み立てます。 大型バージョンの場合、2.5 mm六角ドライバーで2本のM4x10ネジを使用して、各フレーム脚の下部に3本のゴム製脚を取り付けます。 最初のフレームの半分を組み立てる 6本のM4x20ネジと2.5mm六角ドライバーを使用して、2本の脚と1本のフレームのハンドルをサイドパネル側にネ ...