
スキャニングソナーの音響画像を理解するために画像の見方やROV搭載時のテクニックをご紹介します。
参考画像ではPing360とBlueROV2を使用していますが、他のスキャニングソナーとROVの組み合わせでもほぼ同様です。
参考メーカーサイト
動作原理
スキャニングソナーの詳しい説明はこちらでも紹介したとおり、音響ビームを放ち、エコーを記録して物体や空間を認識する商品です。
音速と物体までの距離
水中での既知の音速とエコーを受信した時刻を組み合わせることで、対象までの距離を計算することができます。
距離 = 既知の水中音速 × (測定したエコーが戻ってくるまでの時間 / 2)
そのため、音速の大きな違いは、ターゲットまでの正確な距離に影響します。
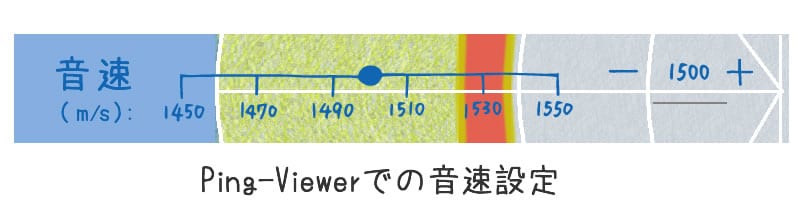
一般的に海水中の音速は約1500m/sですが、水温や塩分濃度、ソナーの使用水深によって変化します。音速計算機を使用すると、さまざまな動作条件に対するより正確な値を得ることができます。
スキャニングソナーには音速を自動計算する機能はありませんが、ビューワーで適切な条件になるように値を変更することができます。
ターゲットの反射率の違い
水とは物質密度が大きく異なるターゲット(ガス、岩石、コンクリート、金属など)は非常に反射率が高く、強いエコーが発生します。
逆に泥、シルト、砂、植物などの物質からのエコーは、水と同じ密度か音響エネルギーを吸収するため弱いエコーになります。
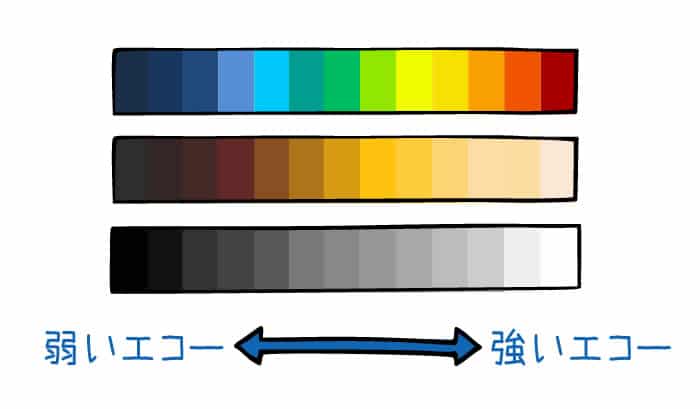
エコーの強さは、カラーパレットでビューアーに表示されます。
一般的なカラーパレットでは、弱いエコーには暗い色が、強いエコーには明るい色が使用されます。

音響ビームのパターン
スキャニングソナーの動きは、暗い場所で懐中電灯を照らすことに例えるとわかりやすいです。懐中電灯の光で照らされた部分だけが見え、それ以外の部分は暗闇のままです。
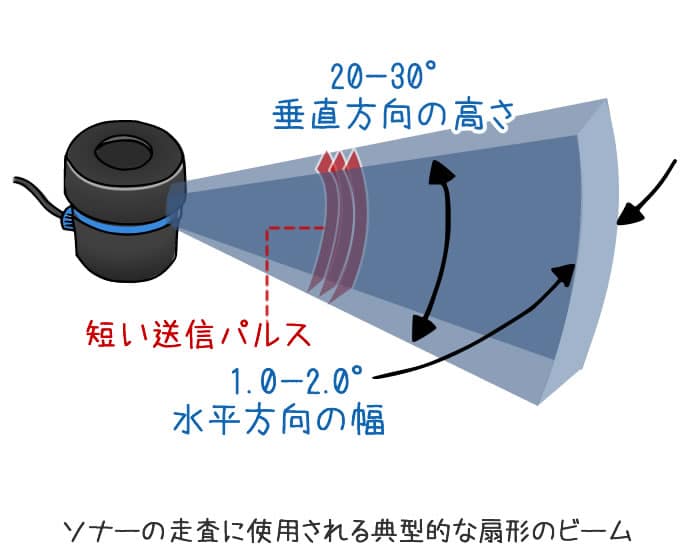
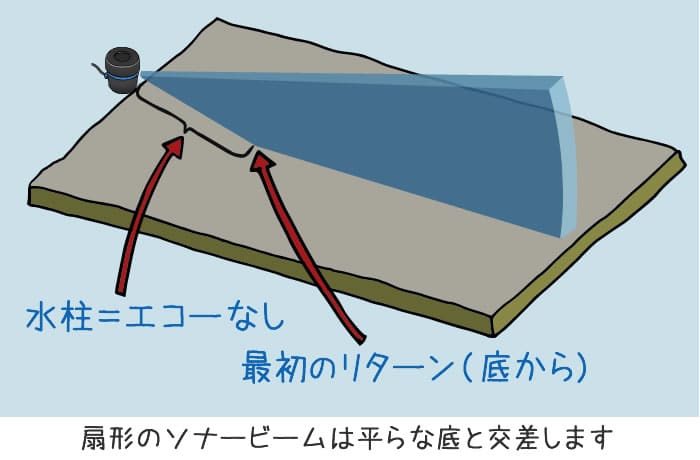
光線に対して、スキャニングソナーは水平・垂直ビームパターンと呼ばれる幅と高さが一定の音響ビームがあります。この音響ビームが、可視光エネルギーの代わりに音響エネルギーで周囲の水中を「照らす」ことになるのです。
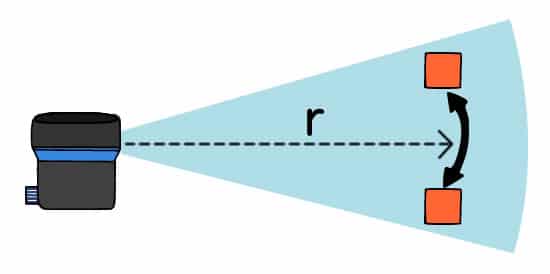
スキャニングソナーには通常、広い垂直ビームと狭い水平ビームがあり、前方に狭い「スライス」を作り出します。
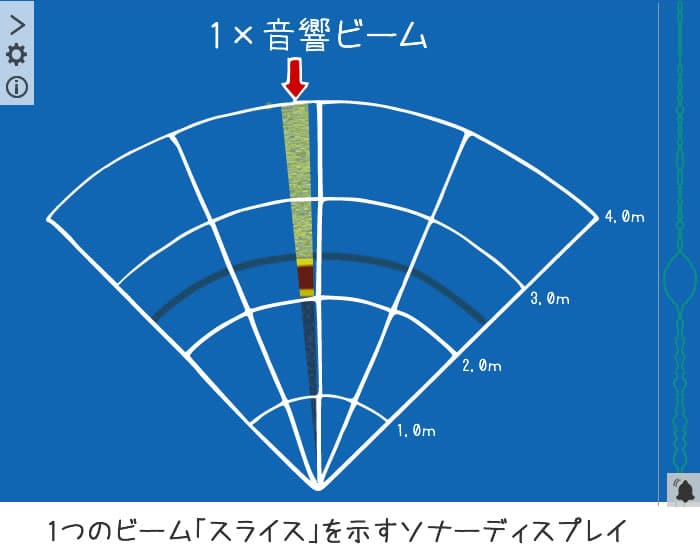
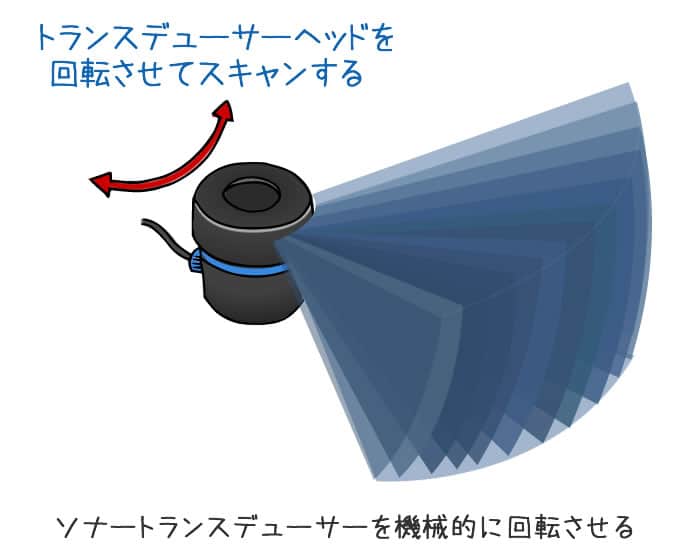
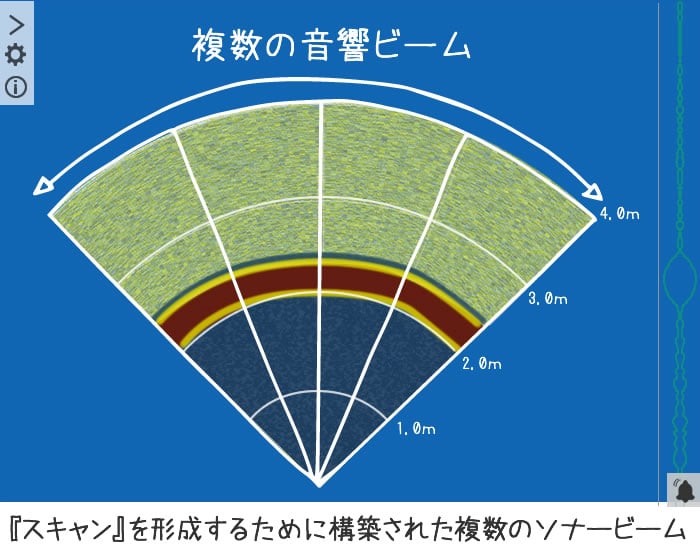
スキャニングソナー内部の振動子ヘッドを機械的に回転させ、ヘッドを円弧状に動かし、スライスした画像をソフト上に表示させます。
例えるなら懐中電灯の光をカメラで撮影し、その光を周囲に照射するようなイメージです。
懐中電灯の細い光では一度にすべてを見ることはできませんが、カメラで撮影した画像を積み重ねることで、パノラマ画像のように全体を一枚の画像として見ることができるようになるのです。
ターゲットの視認性
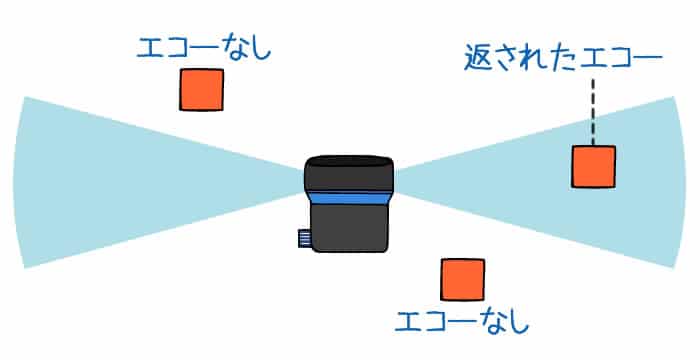
ソナーの水平および垂直ビームパターン内のターゲットは、音響的に照らされ、そのエコーはソナーに反射されて、画像として受信されます。
ビームパターンの外側にあるターゲット(上、下、水平範囲外)は、ビューアディスプレイに表示されません。
垂直方向到着角度と傾斜範囲
スキャニングソナーは、垂直方向の到達角度が同じ物体を区別することができません。
つまり、2つの目標物がソナーの前方に同じ距離で存在する場合、ソナーはこれら2つのエコーの組み合わせからなる1つの結果を表示します。

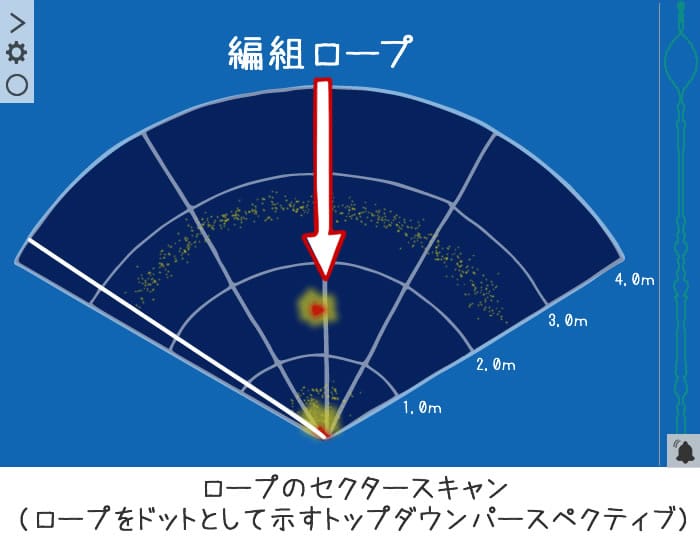
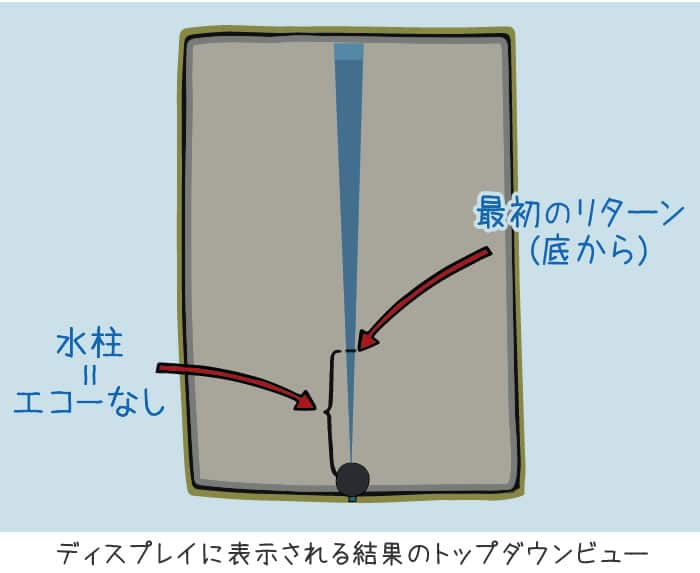
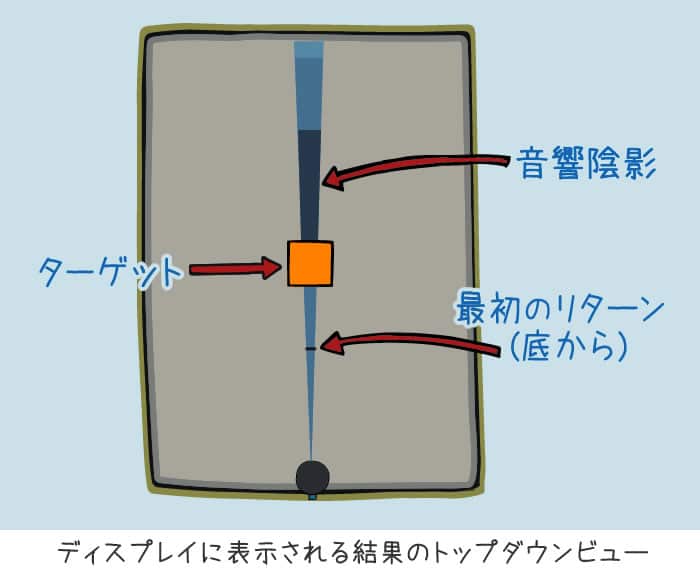
懐中電灯の光に例えると、スキャニングソナーは異なる高度にあるターゲットを区別できないため、ディスプレイに表示されるソナー画像は、そのエリアを俯瞰して見ている(トップダウン)と考えることになります。
効率的なデータ収集法
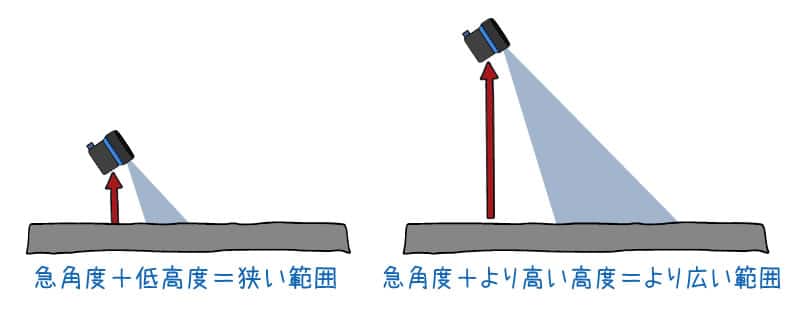
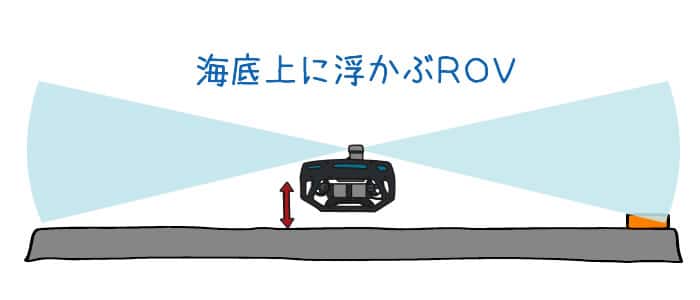
海底の探査では距離が離れると信号強度が低下するため、スキャニングソナーを角度をつけた状態で取り付けて海底のさまざまな部分を照らし出し、ディスプレイで確認することが可能です。
ソナーの位置が低く、急角度で下向きに角度がついている場合、全体の面積のうち狭い部分しか表示されません。位置を上げることで、より広い範囲の海底を照らすことができます。
海底のターゲットを探す場合、ソナーの角度を少し下げた状態で、海底からの高度のバランスをとることが最も効果的な使い方です。これにより、ソナーの信号強度に対して最も長い海底画像範囲を得ることができます。

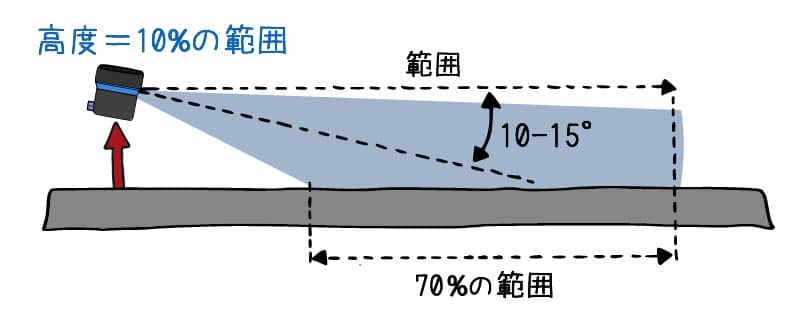
「高度10%ルール」
一般的なルールとして、スキャニングソナー(サイドスキャンとメカニカルスキャンの両方)は、ダウンアングルが10~15度で高度が動作範囲の10%であれば、所定のエリアの海底被覆率は約70%を達成できます。
例えば、10メートルの範囲では、ソナーは海底から1メートルの高度がいいでしょう。
20メートルレンジでは、ソナーは2メートルの高度を持つ必要があります。
音響の影
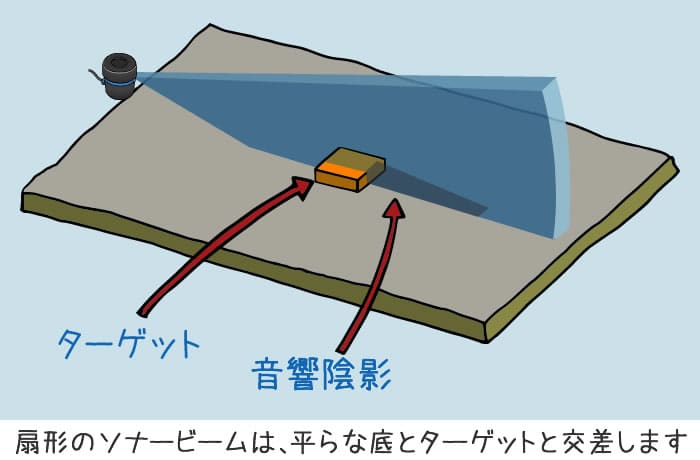
ソナーが海底にあるターゲットを見つけたとき、高さ、形状、方向を判断するために、引き続き懐中電灯を例に説明します。
懐中電灯で照らされた対象物の後ろに「可視光の影」が見えるのと同じように、照らされた対象物の後ろに「音響の影」が表示されます。
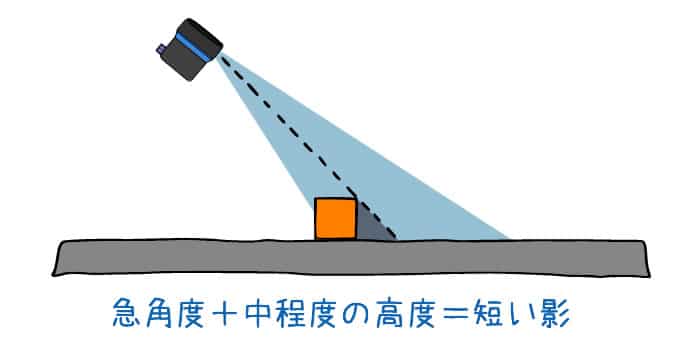
ソナーの位置が比較的高く、ダウンアングルが急な場合、音響影は短くなります。短い音像は見づらい場合があり、ターゲットの確認が難しくなります。
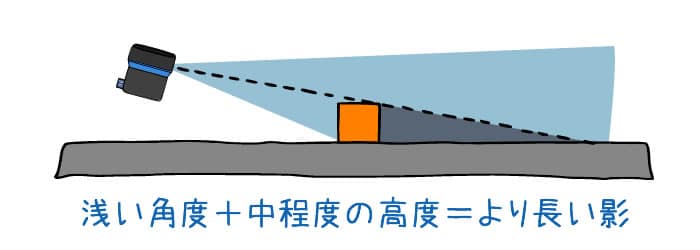
ソナーの位置が底に近く、ダウンアングルが浅い場合、ターゲットの音響影は長くなり、確認が容易になります。
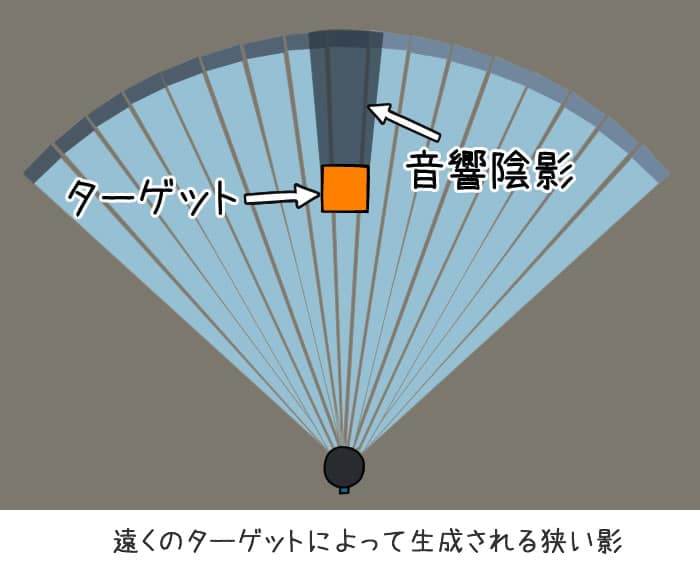
遠方にいるターゲットの音響影は、ソナービームの角度形状に基づき、比較的狭くなります。音響影の幅は、ソナーをターゲットに近づけると大きくなります。影が広がると音響信号がないため、音響影にあるターゲットが見えなくなる可能性があります。
ターゲットがソナーに近づくと、より大きな影ができてターゲットが見えなくなります。
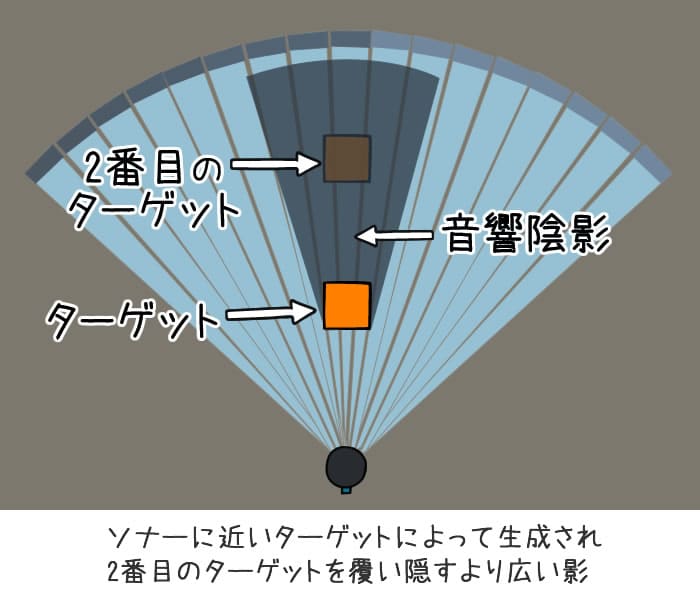
複数のターゲットが同じエリアにあり影に隠れている場合は、高度を上げ、ソナーの角度を下げて影を短くすると、ターゲットをより識別しやすくなる場合があります。
エコーのとらえ方と2.5次元画像への利用
スキャニングソナーはターゲットを横から照らします。そのため、ソナーに近いエッジや表面だけが照らされます。
ソナーに対して垂直なターゲットの表面は、最も強い反響を返し、その他の角度の表面は音響波がソナーから離れて反射するため、弱い反響を返すことになります。
たとえば底に置かれたタイヤのソナー画像では、ソナーに近いタイヤの端が最も明るく、上を向いているタイヤの面は弱いエコーが返されます。

先に説明した「10%ルール」を利用して、ソナーの高度を上げ、少しダウンアングルにすることで、ターゲットの正面と上面を照らした2.5次元の画像を作成することができる場合があります。
2.5次元の画像は、ソナーに最も近い表面を照らすよりも簡単に判断することができます。
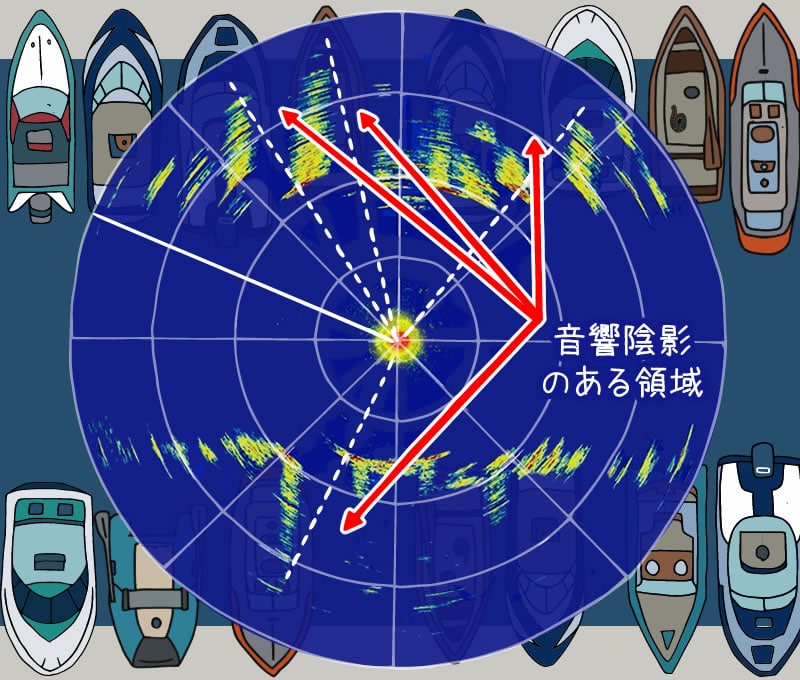
環境からの反響
このような音響の原理は、より広い場所でも同じです。例えば船が多くある船場中央で利用した場合、明るい反射光は、ソナーからの「視線」内にある特徴を示しています。リターンの背後にある不明瞭な領域は、影またはノーリターンの領域として示されています。
スキャニングソナーによるROVナビゲーション
音響画像は見え方に慣れが必要でやや難しく感じるかもしれませんが、ROVに搭載した場合、スキャニングソナーは重要なナビゲーションツールになります。視界が悪い場所では、ROVのオペレーターはカメラ映像でしか情報を得られません。視界が1メートル未満になることも珍しくありません。
スキャニングソナーを使えば、ターゲットを特定できる範囲が広がります。海底を見ながらターゲットを探すよりも、水中で静止したり着底したりし、周辺を完全にスキャンする方が有効な場合があります。オペレーターは、スキャンされた音響画像を見てターゲットの方向を見出すことができます。
スキャニングソナー搭載時のROVの動かし方
小型ROVはサイズが小さいため流れの影響を受け、垂直面または水平面のどちらかに意図しない動きをすることがよくあります。スキャニングソナーの場合、画像は、トランスデューサーのヘッドがその中心点軸を中心に回転(またはステップ)することで生成されます。
画像が完全に生成される前に、オペレーターの操縦や流れなどの影響でROVが移動すると、「イメージスミア」が発生します。これは画像のプロットをゆがめてしまい、音響画像を利用した判断ができなくなります。
このような場合、ROVを静かに着底させるか、セクタースキャンを狭めてリフレッシュレートを速くし、ROVをその軸を中心に回転させた方がよい場合があります。
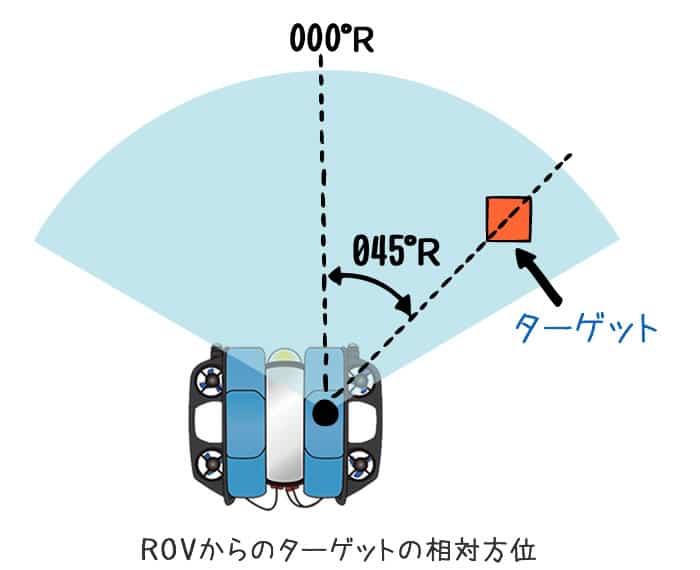
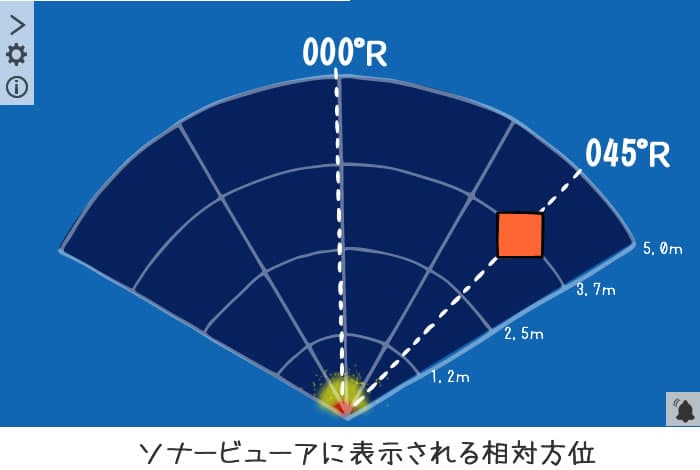
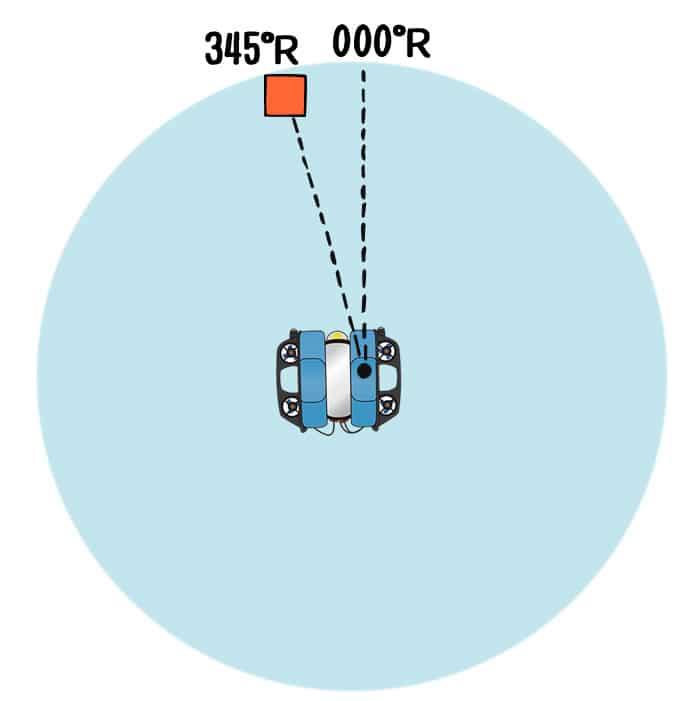
相対的な軸
ソナービューワーで目標物を見る場合、目標物に対する角度は「相対方位」と見なされ、目標物は真正面から時計回りの角度で読み取られています。
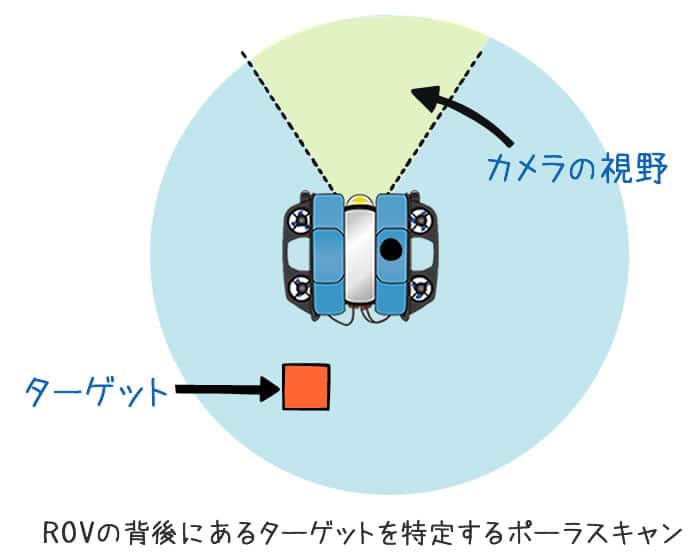
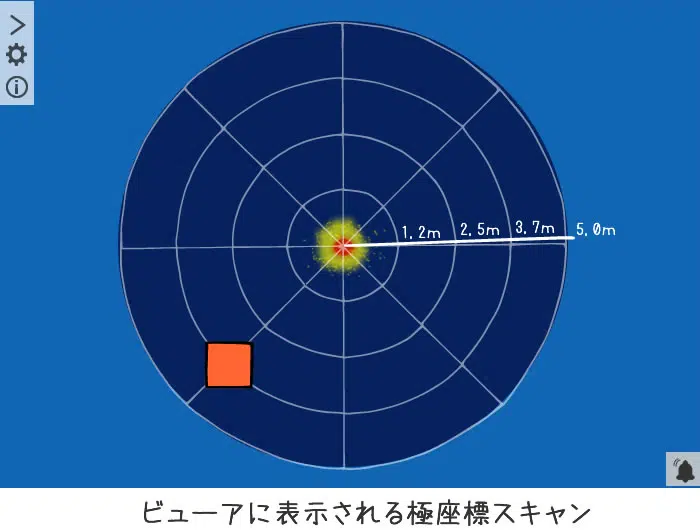
ポーラースキャン
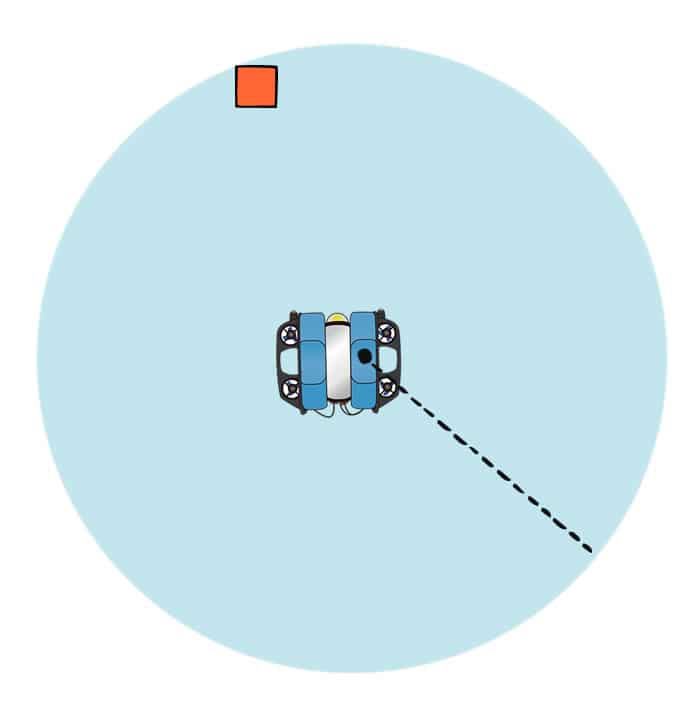
360度連続のスキャンは「ポーラースキャン」として知られています。
ポーラースキャンは、視界の悪い状況でROVの全周囲の状況を把握するのに有効です。カメラは通常、視野が狭く(~90度)基本的に周囲や横を見ることはできません。ポーラースキャンは、ROVの側面や背後にあるものを把握するのに有効です。
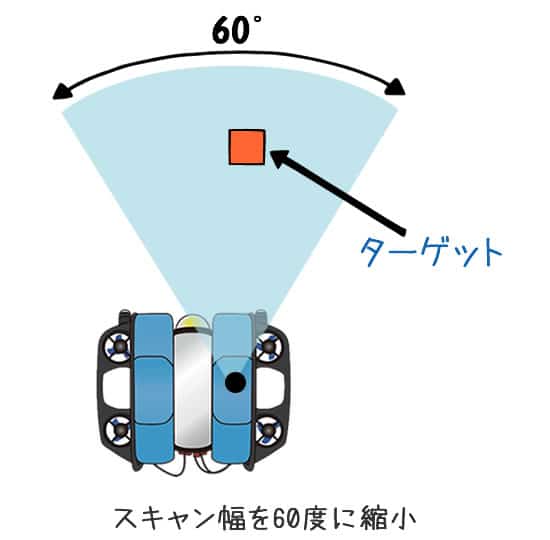
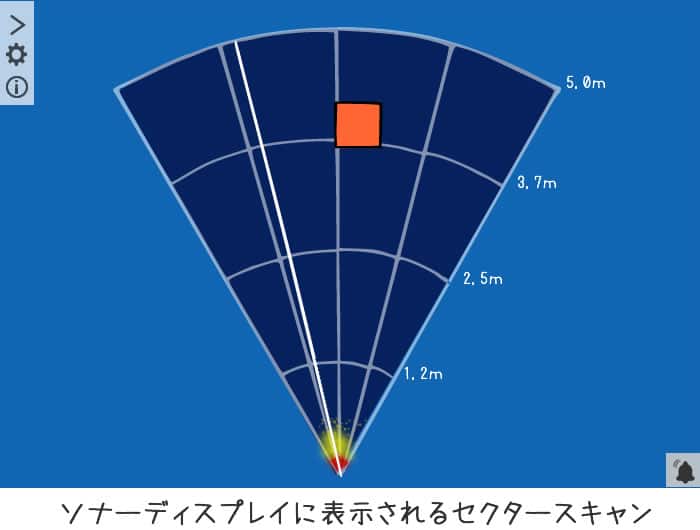
セクタースキャン
360度未満のソナーは「セクタースキャン」と呼ばれます。
セクタースキャンは、ターゲットを撮像する際にスキャンのリフレッシュレートを上げたり、移動中のターゲットを追跡するのに有効です。セクタースキャンの欠点は、ROVの側面や背後を撮影することができなくなることです。
ROV搭載のスキャニングソナーによるターゲットの探知
海底や水柱にあるターゲットを見つけることは、ナビゲーション目的以外のスキャニングソナーのもう一つの用途です。
小さなターゲットは大きなターゲットよりも見つけにくく、識別しにくいため、スキャニングソナーの使い方を覚えるには練習が必要です。
重要なのは、新しい画像が生成されるまでの時間を考慮して、ゆっくりと操縦し、旋回することです。
1. ROVを底面または底面近くの非常に安定した位置に置く。

2. 360度ポーラスキャンを生成できるようにする。
3. ターゲットの相対的な方位を特定する。
4. ROVを回転させ、相対方位がゼロになるようにターゲットを合わせる。

