

世界中の探検家、研究者、捜索・回収チームに向けて、コストパフォーマンスに優れたROV位置測定システムを提供しています。
ROVロケーター(ROVL)ファミリーには、ROVと上位コンポーネント間でのタイミング同期方式が異なる2種類のモデルがあります。
詳細は以下をご覧ください。
ROVロケーター Mk II (GNSS同期型)
ROVロケーター Mk IIは、水中位置測定ソリューションのコストパフォーマンスを新たなレベルへ引き上げます。
最大300mの深度に対応し、ミッション開始時に水晶発振器の校正やユニット間距離の手動同期を行う必要がないため、すぐに運用を開始できます。
SKU:ROVL-MKII-TX-RX-AS-CBLA
ROVロケーター Mk II 特徴
- 独立GNSS搭載
ROV側のトップサイド受信機と送信機それぞれにGNSS装置を内蔵 - 事前同期
運用開始前にグローバルGNSSタイミングで両方の時計を同期 - フリーランモード
水中潜行中はフリーラン動作で時間計測を継続(誤差:約1時間あたり1m) - 再同期可能
両ユニットを水面に引き上げることでいつでも再同期可能 - 高コストパフォーマンス
水中位置測定ソリューションのコスト効率を向上 - 深度対応
最大300mまで運用可能 - 簡単な運用開始
ミッション開始時に水晶発振器の校正や距離の手動同期が不要
製品説明
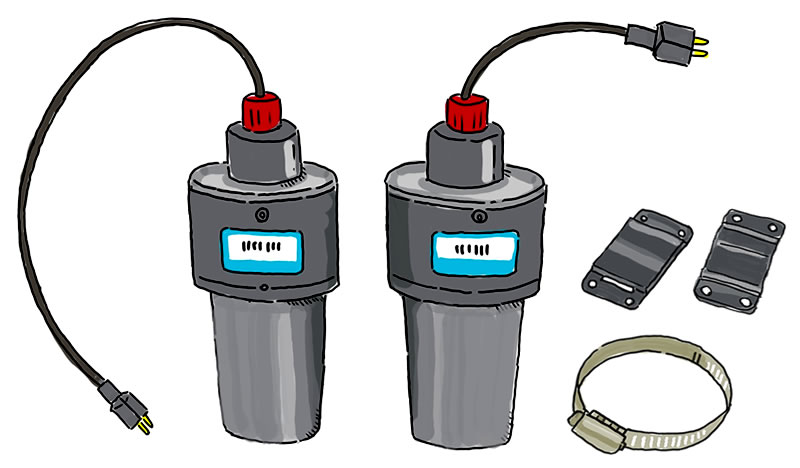
ROVロケーター Mk IIには、ROVに搭載する送信機と、水面に設置する受信モジュールが含まれています。
セットには、マウントリングとアダプターも付属します。電源を入れて潜航を開始すれば、QGroundControlのマップ上でROVの位置をリアルタイムに追跡できます。
シリアル通信およびAPIにも対応しています。
オートシンク機能は、ミッション開始時やミッション中の任意のタイミングで、受信機と送信機をGPSまたはGNSS信号に曝露することで動作します。
衛星捕捉は、電源投入から通常30秒以内に完了します。
標準的な運用では、ROVL受信機はROVオペレーター付近に設置され、ROVL送信機はROVに搭載されます。
この場合、衛星捕捉は通常バックグラウンドで行われ、ROVの打ち上げ準備中やROVL受信機のIMU校正時に実施されます。
詳細情報
上部コンピュータ用GPSオプション
Cerulean ROVロケーターは、上部コンピュータに接続された任意のサードパーティ製シリアルGPSと互換性があります。
以下は、当社で使用実績のあるGPS USBレシーバーの例です。
同梱物
- 送信機 ×1
- 受信機 ×1
- ホースクランプマウント ×1
- ブラケット ×2
注意事項:ROVL Mk II製品をご購入の際は、Cerulean製「6.5メートル シリアル-USB変換ケーブル」を事前に組み込む必要があります。後からのアップグレードはできません。
Mk II 仕様表
| 項目 | 内容 |
|---|---|
| 最大耐圧深度(最低破壊深度) | 300m |
| 受信機ユニットの体積 | 283ml |
| 受信機ユニットの質量 | 335g |
| 送信機ユニットの体積 | 283ml |
| 送信機ユニットの質量 | 298g |
| 絶対最大通信距離 | 500m |
| 通常使用可能距離 | 300m |
| 見かけのヨー/方位角分解能 | 0.1° |
| 見かけの仰角分解能 | 0.1° |
| 斜距離測定分解能 | 0.1m |
| 斜距離誤差蓄積(ベースライン・通常) | 2m/時 |
| 斜距離誤差蓄積(ベースライン・自動同期) | 0.5m/時 |
| IMUオイラー角精度(磁気誤差除く) | 2°(典型値) |
| 更新レート | 1Hz |
| ピング周波数 | 25kHz |
| 受信機電源入力 (USBシリアル変換でラップトップから動作可能) |
DC 4.5V~16V 消費電力 <1W |
| 送信機電源入力 (※安定動作のため、瞬間的な電流に対応できる電源が必要です。5Vでも動作しますが、9V以上の使用を推奨します。) |
DC 5V~28V 1.4W(@5V) 1.6W(@28V) |
| シリアル通信電圧レベル | 3.3V TTL または 5V TTL(自動認識) |
備考:「分解能」は「精度」とは異なります
ROVロケーター Mk III (音響同期式)
Mk III ROVロケーターは、コストパフォーマンスに優れた水中位置測定ソリューションの使いやすさを、さらに進化させたモデルです。
Mk IIIは、上部側にトランシーバー、ROV側にトランスポンダーを備えた、従来型のデュプレックス音響通信方式を採用しています。
上部側のトランシーバーが最初にピングを送信し、ROV側のトランスポンダーがそれを受信すると、水面側に向けて応答ピングを返します。
この方式では、両端で時計を同期させる必要がありません。
 SKU:ROVL-MKIII-TX-RX-CBLA
SKU:ROVL-MKIII-TX-RX-CBLA
ROVロケーター Mk IIIの特徴
- 賢い通信方式
従来のUSBLシステムで採用される「質問/応答方式」を採用し、距離同期や水晶発振器の校正が不要 - ソフトウェア連携
付属の CeruleanTracker ソフトウェアで即運用可能 - API統合
オープンAPIにより、自社ソフトウェアへの統合が可能 - 高精度測位
タイムベースのドリフトがなく、斜距離の精度を長時間維持 - 深度対応
最大 300m まで対応可能 - 長時間運用
精度を損なわずに長時間の水中ミッションが可能
製品説明
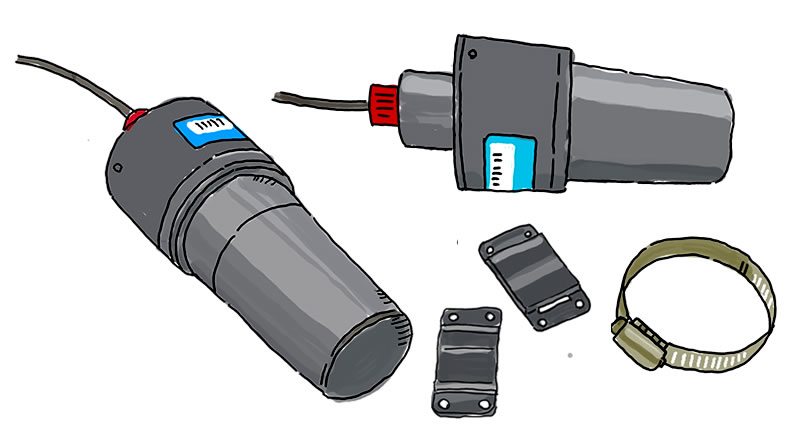
Mark III ROVロケーターバンドルには、トランスポンダー(通常はROVまたはAUVに搭載)と、トランシーバーモジュール(通常は水面に設置)が含まれます。
さらに、ROV/AUV用のマウントリングとアダプターも付属します。
ROV/AUVへの統合は非常に簡単で、車両のバッテリーから電源を供給するだけで運用可能です。
また、主要バッテリーが故障した場合でも車両を追跡できるよう、Mark III専用の外部バッテリーを追加することもできます。
電源を投入して潜航を開始すれば、QGroundControlの地図表示でROVの位置をリアルタイムに追跡できます。
QGCを使用しない場合は、無料のCeruleanMap表示ソフトウェアをご利用いただけます。
トランシーバーまたはトランスポンダーとのシリアル通信が可能で、オープンAPIについてはユーザーマニュアルに記載されています。
詳細情報
運用時、Mark IIIトランシーバーはトランスポンダーに向けて質問用のソナーパルスを送信し、トランスポンダーが応答パルスを返します。
斜距離は、この往復伝播時間から算出されます。
Mark IIシステムとは異なり、ミッション開始時にタイムベースの同期を行う必要はありません。また、Mark IIIシステムは 斜距離の精度がドリフトする心配なく、長時間水中に留まることが可能です。
なお、同一エリアで同時に稼働できるMark IIIシステムは1組のみです。
同梱物
- トランシーバー ×1
- トランスポンダー ×1
- ホースクランプマウント ×1
- ブラケット ×2
Mk III 仕様表
| 項目 | 内容 |
|---|---|
| 最大耐圧深度(最低破壊深度) | 300m |
| トランシーバーユニットの体積 | 480ml |
| トランシーバーユニットの質量 | 600g |
| トランスポンダーユニットの体積 | 300ml |
| トランスポンダーユニットの質量 | 410g |
| 絶対最大通信距離 | 300m |
| 通常使用可能距離 | 300m |
| 見かけのヨー/方位角分解能 | 0.1° |
| 見かけの仰角分解能 | 0.1° |
| 斜距離測定分解能 | 0.1m |
| IMUオイラー角精度(磁気誤差除く) | 2°(典型値) |
| 更新レート | 1Hz |
| トランシーバーのピング周波数 | 43kHz |
| トランスポンダーのピング周波数 | 25kHz |
| トランシーバー電源入力 | DC 5~16V 平均2.5W/ピーク3.5W(@5V) 平均2.1W/ピーク3.3W(@12V) |
| トランスポンダー電源入力 | DC 5~28V 平均1.7W/ピーク2.9W(@5V) 平均1.3W/ピーク4.1W(@16V) |
| シリアル通信電圧レベル | 3.3V TTL または 5V TTL(自動認識) |
備考①:両ユニットとも、瞬間的な電流(バースト電流)に対応できる電源が必要です。送信機は低インピーダンスの5V電源でも動作しますが、9V以上の使用を推奨します。5V電源を使用する場合は、インピーダンスが十分低いか確認してください。
備考②:「分解能」は「精度」とは異なります。
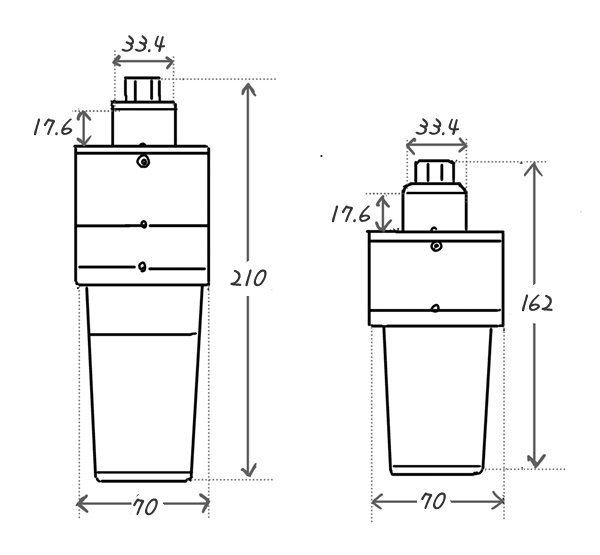
2D図面





ファミリーには、ROVと上位コンポーネント間でのタイ){kind=link}