

本記事では、Arduinoを使用して Pingソナー からデータを読み取り、結果を出力する方法を解説します。
Pingソナーは、多目的に利用できる シングルビーム測深機 です。
ROVやAUVの 高度計、USVに搭載した 測深作業、さらには障害物回避用ソナー など、さまざまな用途に使用されています。
シリアル通信に対応しているため、Arduinoをはじめとする各種マイクロコントローラと容易に接続・連携できます。

Pingソナー高度計/エコーサウンダー
Pingソナーは、高度計およびエコーサウンダーとして使用できるソナーです。
最大測定距離は100m、ビーム幅は25度で、シリアル通信に対応しています。
部品および工具
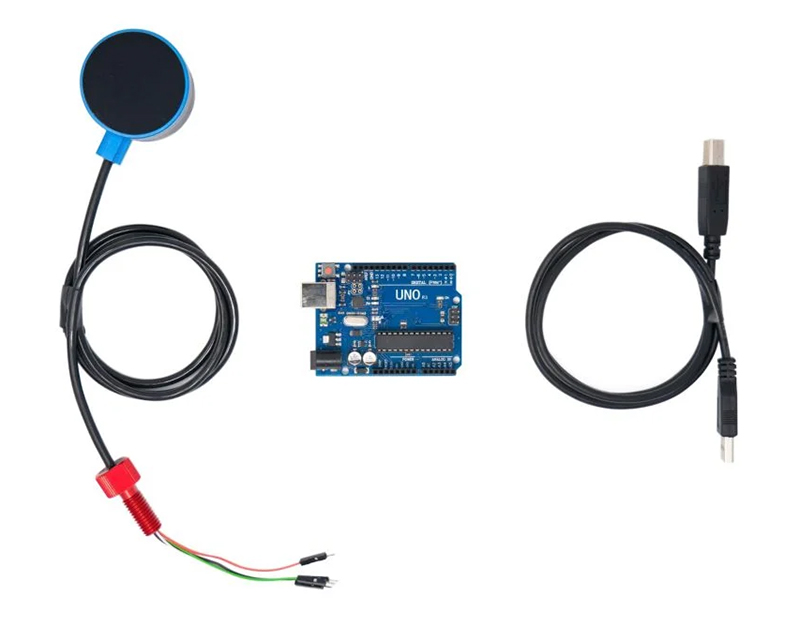
本ガイドで使用する主なコンポーネント
必要なもの
 |
Ping ソナー高度計/エコーサウンダー ・測定レンジ:最大100m ・ビーム幅:25度 ・通信方式:シリアル通信 |
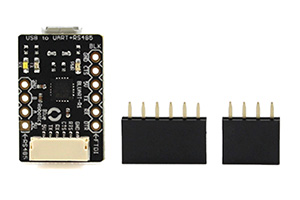 |
BLUART USB–TTL シリアル/RS485 アダプター ・0.1インチヘッダおよび JST-GH コネクタ搭載 |
 |
6インチ ストレート Micro-USB − USB-A ケーブル ・コンパクトなスペースや筐体内への組み込みに適しています |
さらに必要なモノ
- Arduino マイクロコントローラ ×1
※本チュートリアルでは Arduino Uno を使用します - USB A − B ケーブル ×1(Arduino ボードを接続するため)
- Arduino IDE
- Ping-Viewer
旧型 Ping ソナーのファームウェアバージョンとボーレート
本ガイドで使用する ping1d-simple スケッチは、Arduino Uno のようにハードウェアシリアルインターフェースが1つしかないArduino ボードとの互換性を確保するため、SoftwareSerial ライブラリを使用しています。
SoftwareSerial を使用する場合、Ping ソナーは 9600 ボーで通信する必要があります。
最新の Ping ソナー用ファームウェアでは、接続時に自動的に適切なボーレートへ切り替わります。
Ping ソナーの機種別ファームウェアについて
▶ 新型の Ping ソナー(本体が全黒) の場合
すでに 最新のファームウェア がインストールされています。
そのため、このセクションはスキップ可能で、新たにファームウェアをインストールする必要はありません。
▶ 旧型の Ping ソナー(本体が黒で、トランスデューサーリングが青) を使用している場合
自動ボーレート切り替えに対応した最新ファームウェアをインストールする必要があります。
Arduino Mega のように複数のハードウェアシリアルインターフェースを備えたArduino ボードを使用する場合は、SoftwareSerial を使用せず、115200 ボーのハードウェアシリアルを利用できます。
この場合、ファームウェアの変更は不要です。
代わりに、ping1d-simple-mega スケッチを使用してください。
Ping ファームウェアの更新手順
- Ping ソナーを BLUART または USB–シリアル変換アダプタでコンピューターに接続します。
※詳細は Ping Sonar クイックスタートガイドを参照してください。 - Ping Viewer を起動します。
- デバイスが正常に通信していることを確認してください。
通信しない場合はトラブルシューティングを参照してください。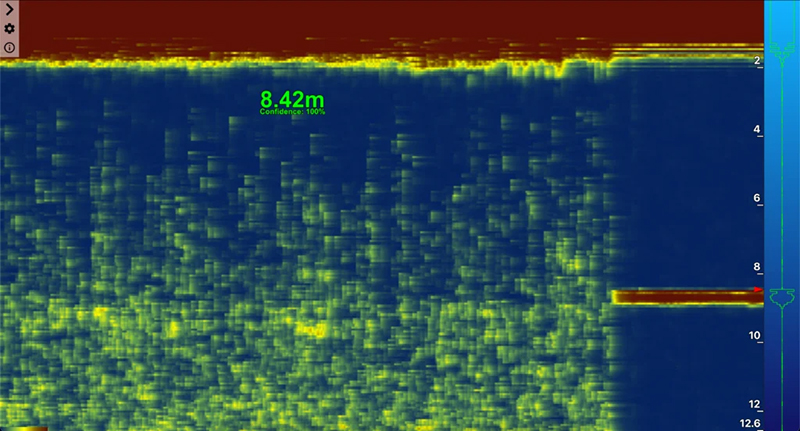
- 歯車アイコンをクリックしてファームウェアパネルを開き、
円形の矢印が付いた3番目のアイコンをクリックします。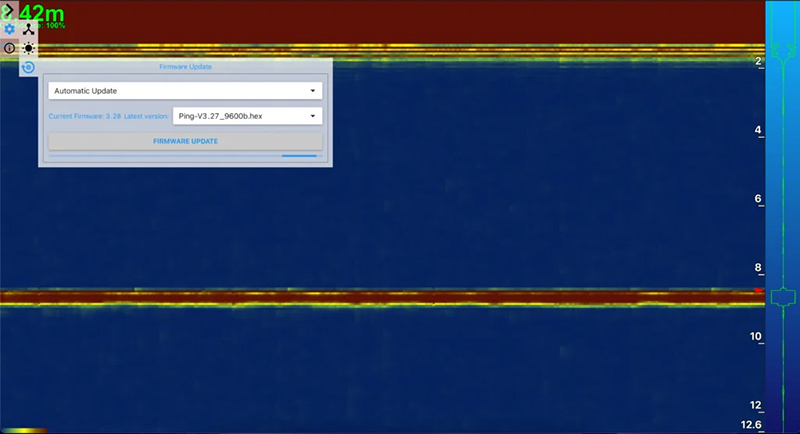
- ファームウェアを
「auto」ファームウェア(ping-V3.28_auto 以降)
に設定します。 - 信頼性の高い USB ポートに接続されていることを確認してください。
- 「ファームウェアのアップグレード」をクリックします。
- 更新が完了すると、再びデータのストリーミングが開始されます
通信速度は低下します。
配線接続

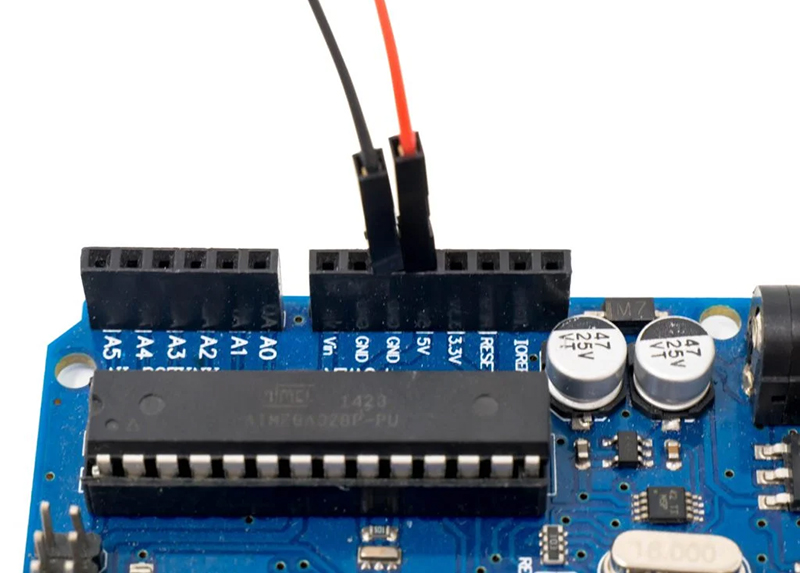
- Ping の赤色の線(5V)を Arduino の 5V ピンに接続します。
- Ping の黒色の線(GND)を Arduino の GND ピンに接続します。
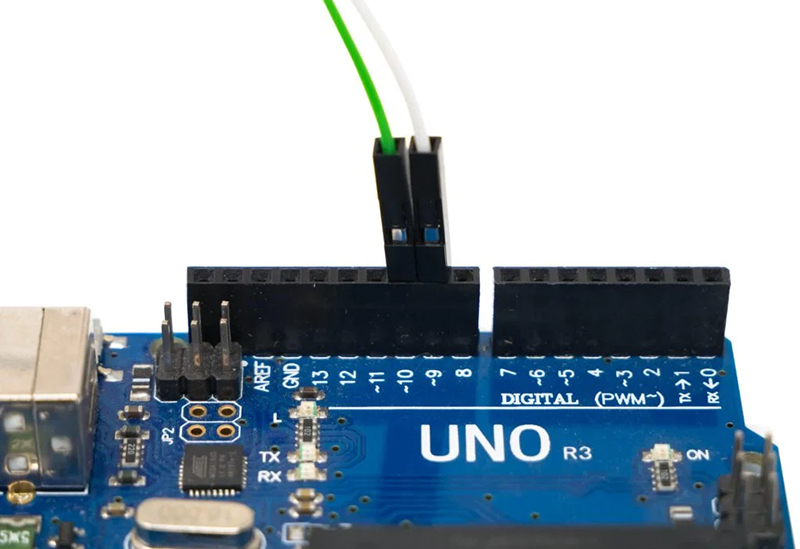
- Ping の白色の線(TX)を Arduino の デジタルピン 9(RX)に接続します。
- Ping の緑色の線(RX)を Arduino の デジタルピン 10(TX)に接続します。
 |
 |
Arduino ライブラリのインストール
Arduino IDE を使用する方法
- Arduino IDE を起動します。
- [スケッチ]→[ライブラリを含める]→[ライブラリを管理…]
を選択します。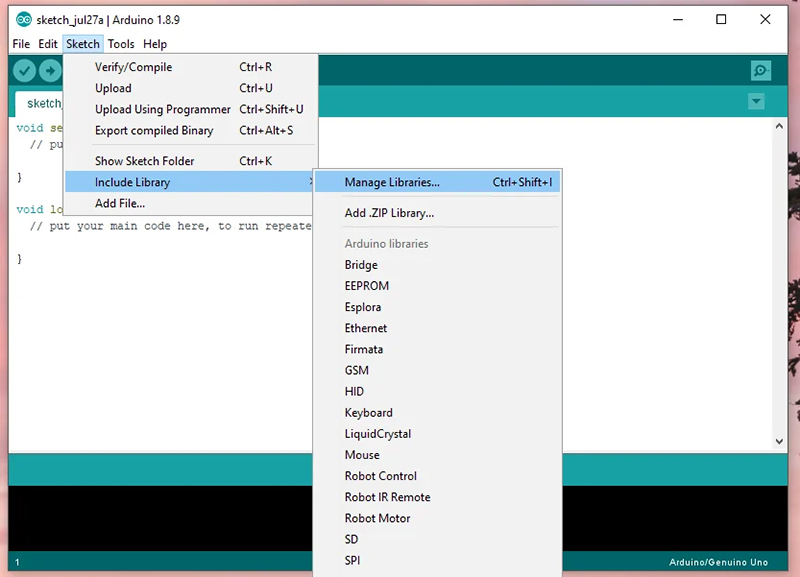
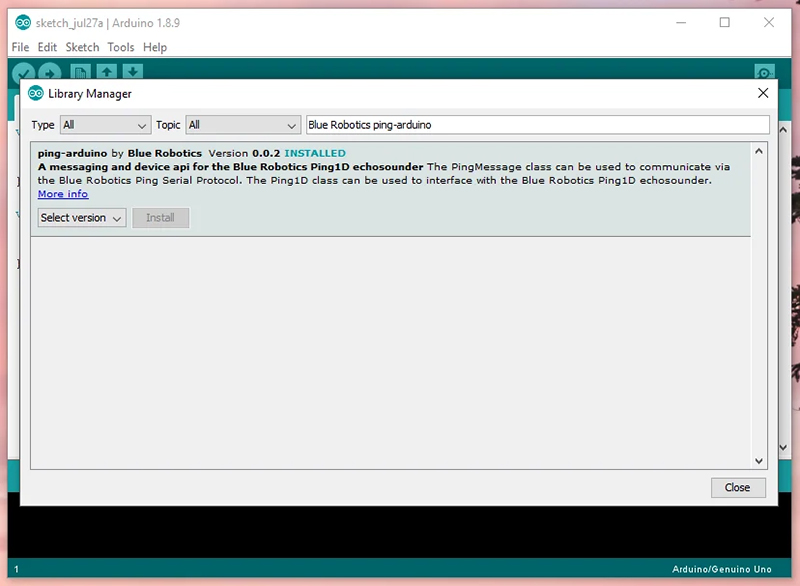
- 「Blue Robotics ping-arduino」を検索し、[インストール]をクリックします。
ZIP ファイルを使用する方法
- 最新の ZIP ファイルをダウンロードします。
こちらからダウンロードできます。 - 解凍したフォルダを Arduino/libraries フォルダに配置します。
シンプルなサンプルの使用
シンプルなサンプルスケッチを Arduino にアップロードし、Ping ソナーから距離(深度)と信頼度を取得します。
- [ファイル]→[スケッチ例]→[ping-arduino]→[ping1d-simple]
を開きます。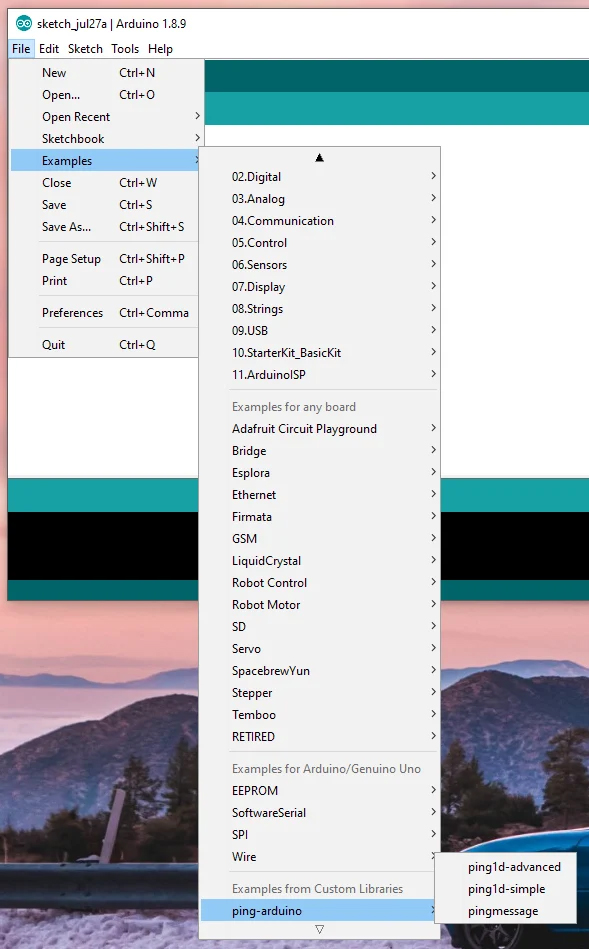
- Arduino にアップロードします。

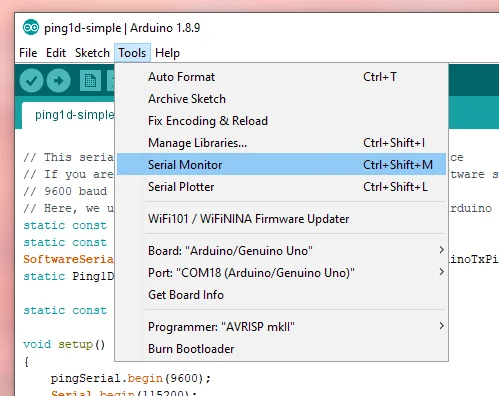
- シリアルモニターを開きます。
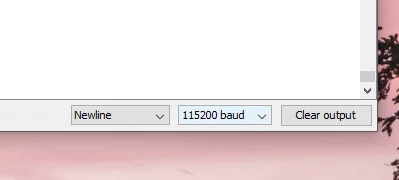
- ボーレートを 115200 に設定します。
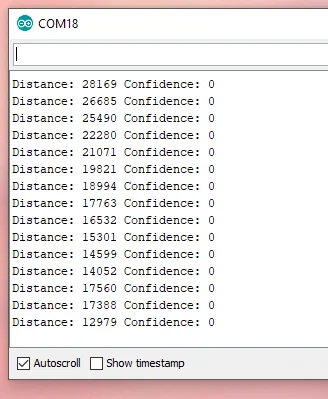
正常に動作していれば、距離(mm)と信頼度(%)が表示されます。
高度な使用方法
Ping ソナーは深度取得以外にもさまざまな制御・通信が可能です。
高度な機能を試すには、ping1d-advanced サンプルを使用してください。
- [ファイル]→[スケッチ例]→[ping-arduino]→[ping1d-advanced]
を開きます。 - アップロードします。
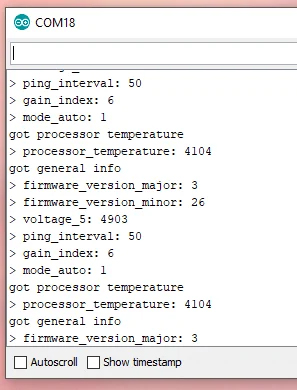
- シリアルモニターを開き、ボーレートが 115200 であることを確認します。
- シリアルモニターに印刷されたデータは以下の通りです。





{kind=link}