

はじめに
Surveyor 240-16 マルチビーム測深機は、BlueBoat をはじめとする小型USVに最適な、コンパクトかつ低コストのマルチビーム測深機です。
最大測深範囲は50mで、内蔵 IMU によりピッチおよびロールの補正を行うため、荒れた海況下でも高い測深精度を維持します。
また、SonarView ソフトウェアと連携することで、測深調査やマッピング用途において、海底のリアルタイム 3D点群データを生成することができます。
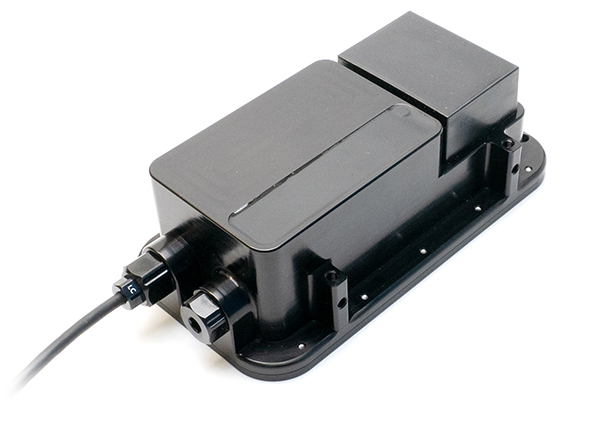
Cerulean Surveyor マルチビーム測深機
測深調査に最適な低コストのマルチビーム測深機
本ガイドでは、Surveyor 240-16 を BlueBoat に取り付ける手順について説明します。
Cerulean 社は、Surveyor 240-16 および SonarViewソフトウェアに関して、非常に充実したドキュメントを提供しています。
ポイント
本機の統合が完了した後は、操作方法や有用なヒントについて 必ず同社の公式ガイドをご参照ください。
キット内容
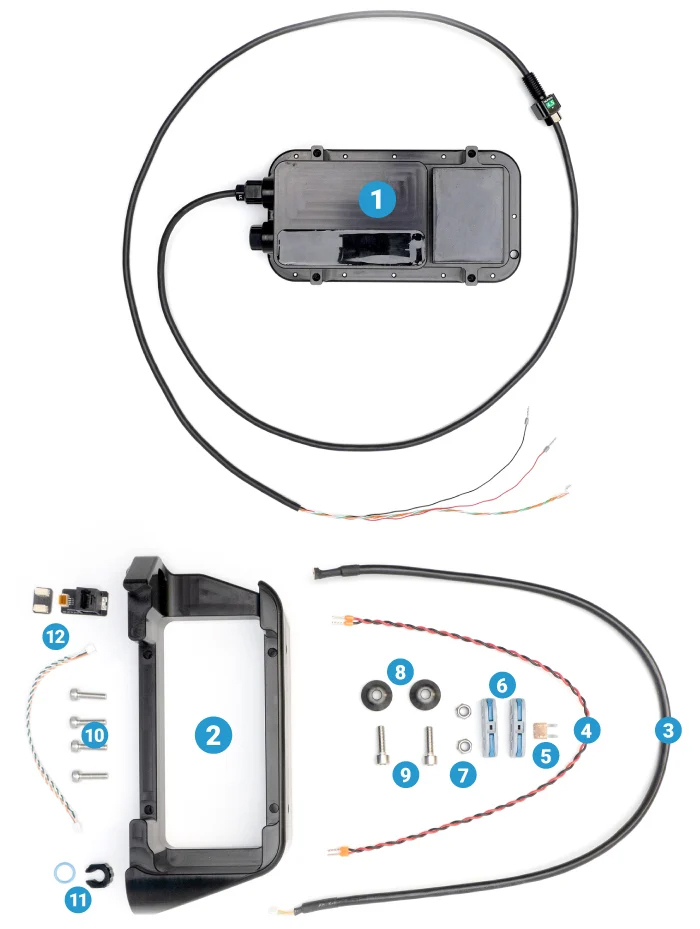 1 × Cerulean Surveyor 240-16 マルチビームエコーサウンダー
1 × Cerulean Surveyor 240-16 マルチビームエコーサウンダー- 1 × Surveyor 240-16 取付ブラケット
- 1 × 600 mm JST GH – JST GH イーサネット延長ケーブル(BR-103531)
- 1 × 400 mm 電源延長ケーブル(BR-103533)
- 1 × 5A ミニブレードヒューズ(BR-101401-005)
- 2 × インラインスナップコネクタ(BR-103548)
- 2 × M6 ナイロンインサートロックナット(BR-101258)
- 2 × BlueBoat 船体取付用ブッシング
- 2 × M6 × 20 ソケットヘッドキャップスクリュー(BR-102241)
- 4 × M5 × 18 ソケットヘッドキャップスクリュー(BR-101191)
- 1 × M10 バルクヘッドナットおよび -013 Oリング(BR-100167-010)
- 1 × ツイストペアケーブル(JST GH カプラー、RJ45 アダプター付き)
※本ガイドで説明する取り付け作業では使用しません
取り付けに必要な部品および工具
Surveyor240-16 キットに加え、取り付けを完了するために以下の部品および工具が必要です。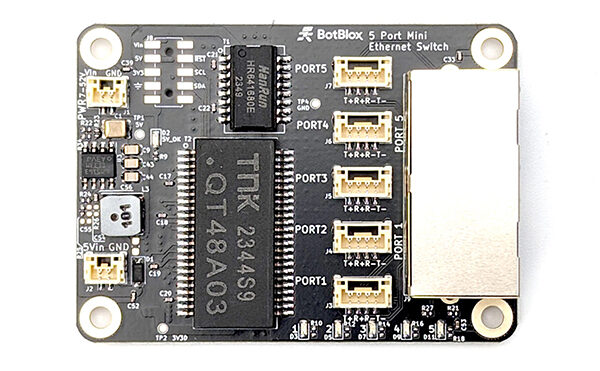 イーサネットスイッチ
イーサネットスイッチ
BlueBoat および BlueROV2 対応のコンパクトイーサネットスイッチ
必要な工具
- 4 mm 六角レンチ(BlueBoat キットに同梱)
- 5 mm 六角レンチ(BlueBoat キットに同梱)
- 小型マイナスドライバー(先端幅 約 2 mm)
- M10 バルクヘッドレンチ または 16 mm スパナ
- シリコングリース(Molykote 111)
- ケーブル管理用結束バンド(※本キットには付属しません)
ケーブル配線オプション
Surveyor のケーブルは、BlueBoat の船尾、または 右舷ハッチ蓋上部 のいずれかから配線することができます。
船尾から配線する場合でも、ハッチ蓋アセンブリを BlueBoat から完全に取り外す機能は維持されます。設置環境や運用方法に応じて、最適な配線方法を選択してください。
 |
 |
| 船尾から配線する方法 | ハッチ蓋から配線する方法 |
ケーブルを船尾から通す場合は、「フェアリング下ケーブル配線」セクションの手順に従ってください。
ハッチ蓋から通す場合は「ハッチ蓋通過ケーブル配線」セクションへ進んでください。
フェアリング下ケーブル配線
必要なもの
- Oリング付き Surveyor バルクヘッド
- M10 バルクヘッドレンチ または 16 mm レンチ
- 4 mm 六角レンチ
- シリコングリース(Molykote 111)
手順
- 右舷側のハッチ蓋アセンブリを BlueBoat から取り外します。
接続されているすべてのケーブルを外し、アセンブリは安全な場所に一時的に保管してください。
- 4 mm 六角レンチを使用して、右舷側船体フェアリングの固定ネジを外し、フェアリングを船体から取り外します。
- Surveyor バルクヘッド用 O リングに、シリコングリース(Molykote 111)を薄く均一に塗布し、バルクヘッド貫通部下側の溝に正しく装着します。

- Surveyorのバルクヘッド貫通部をM14アダプター貫通部に取り付けます。
その前に、M10 バルクヘッドレンチ(または16mmレンチ)を使用して、M14アダプター貫通部に取り付けられている M10ブランクプラグを取り外してください。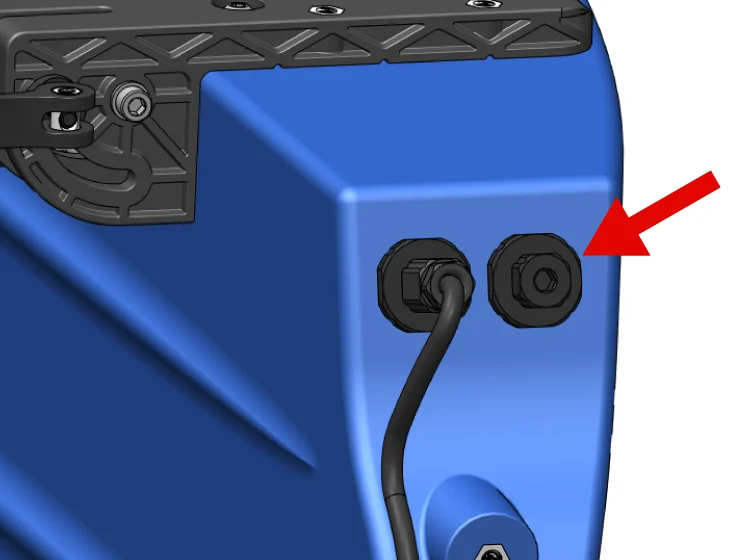
必要に応じて、バルクヘッドの取り付け作業を容易にするため、M14 アダプター全体を一時的に取り外すことも可能です。
その場合は、M14バルクヘッドレンチ(または 20 mm レンチ)を使用し、船体内部でアダプターを固定している Cナットを緩めてください。
※M14 アダプター下部の O リングを紛失しないよう注意してください。

- Surveyor のバルクヘッド貫通器をアダプター貫通器に取り付け、M10バルクヘッドレンチ(または 16mmレンチ)で確実に締め付けます。
※この手順では バルクヘッド用 C ナットは使用しません。以前に M14 アダプター貫通部を取り外している場合は、この時点で船体へ再取り付けしてください。
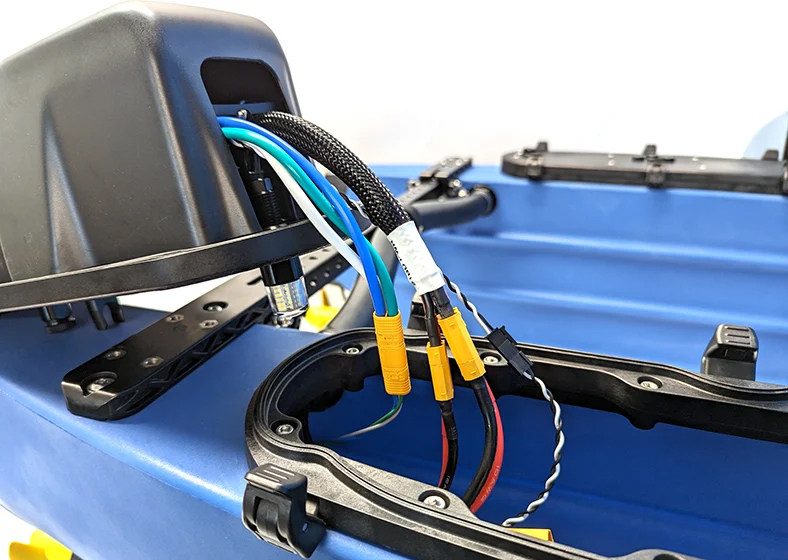
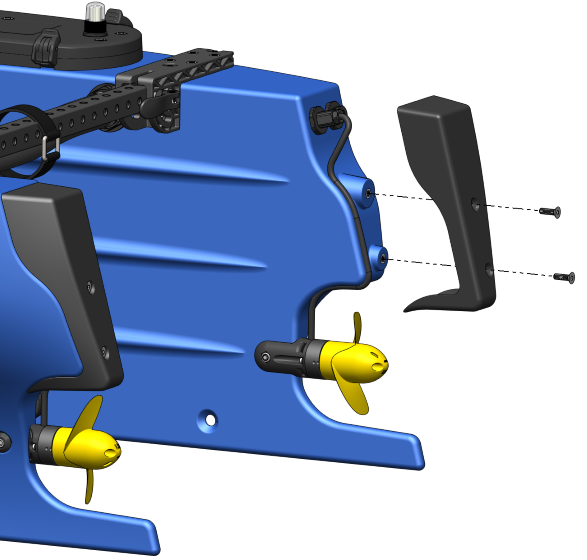
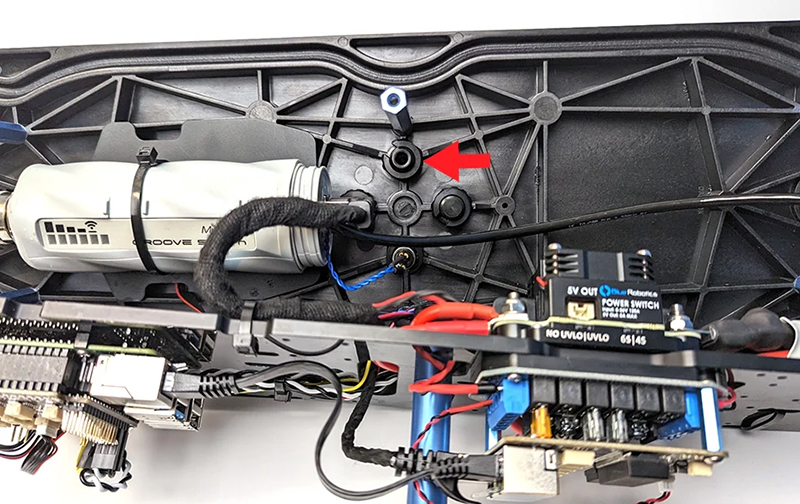
- フェアリングを右舷側船体に再取り付けします。
Surveyor ケーブルがフェアリングの切り欠きを通り、モーターケーブルと並行して配線されていることを確認してください。
この時点での設置状態は、図に示すとおりです。
続いて 「ケーブル接続」セクションへ進んでください。
ハッチ蓋からのケーブル配線方法
本セクションでは、Surveyor ケーブルをハッチ蓋から配線する手順を説明します。
すでにケーブルの配線が完了している場合は、このセクションをスキップし、「ケーブル接続」セクションへ進んでください。
必要なもの
- Surveyor 本体(付属のバルクヘッド用 O リングおよび C ナットを含む)
- M10 バルクヘッドレンチ または 16 mm レンチ
- 2.5 mm 六角レンチ
- シリコングリース(Molykote 111)
手順
- すべてのケーブルを取り外し、右舷側ハッチ蓋アセンブリを BlueBoat から取り外します。
- 親指ナットを緩め、右舷ハッチ蓋アセンブリのカバーを取り外します。
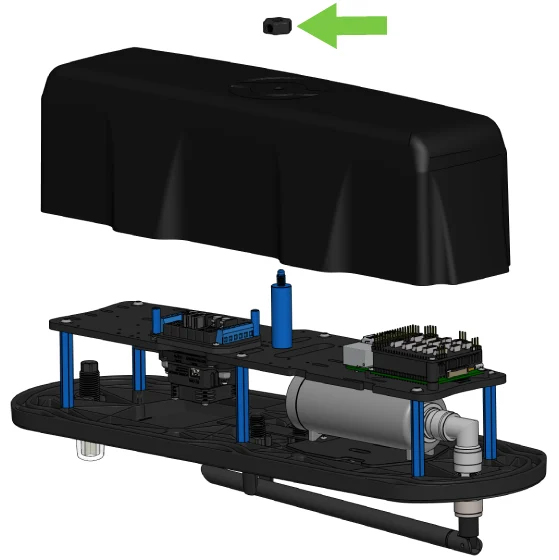
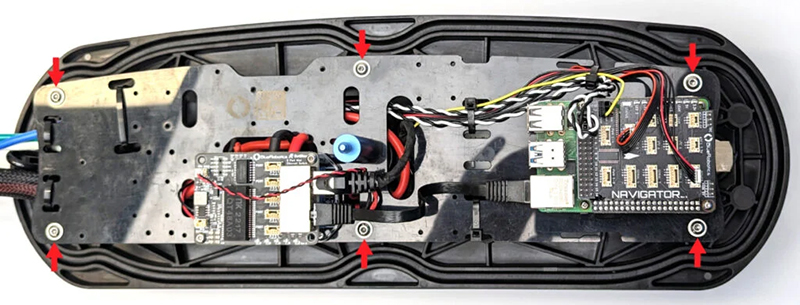
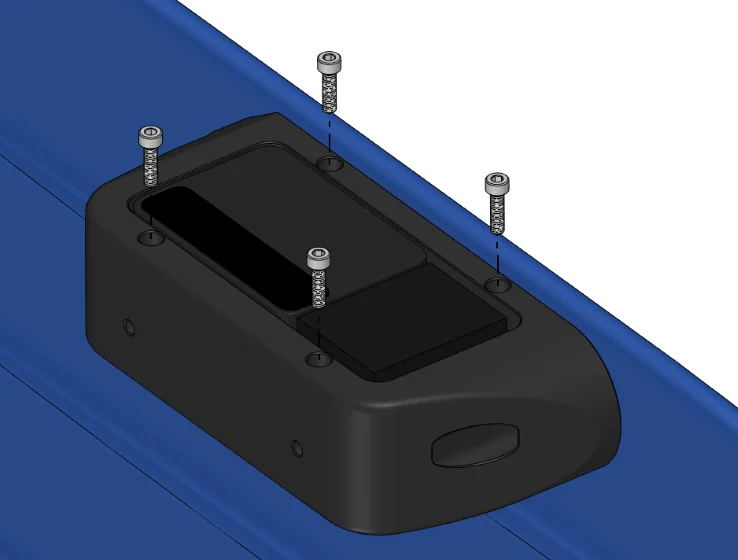
- 2.5 mm 六角レンチを使用して、電子機器トレイを固定している六角ナット 6 個
(旧型艇ではフランジヘッドネジ)を外します。
電子機器トレイを脇に移動させますが、配線を強く引っ張らないよう注意してください。
- M10 バルクヘッドレンチまたは 16 mm レンチを使用し、ブランクペネトレーターの 1 つから C ナットを緩めます。
- Surveyor バルクヘッド用 O リングに、シリコングリース(Molykote 111)を
薄く均一に塗布し、ペネトレーター底面の溝に正しく装着します。
- Surveyor のバルクヘッド貫通部を穴に挿入し、反対側から C ナットを取り付けます。
まず手で軽く締め、その後レンチを使用して確実に固定してください。

旧型 BlueBoat の場合、ハッチ蓋にはバルクヘッドの回転を防止するための凹みがあります。バルクヘッドがこの凹みに完全に嵌合していることを確認し、レンチは C ナットの締め付けのみに使用してください。
バルクヘッド本体を回転させないでください。
- 電子機器トレイを 取り外したナットまたはネジを使用して、元のスタンドオフ位置に再度取り付けます。
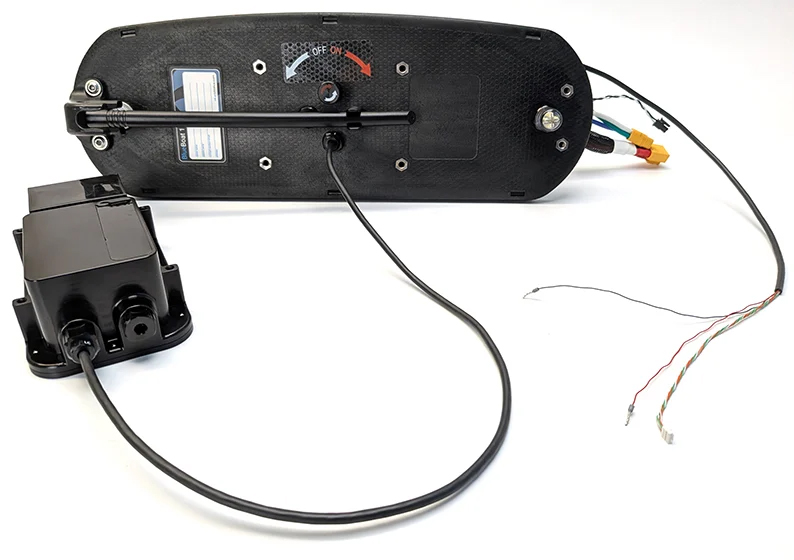
この時点で、ハッチ蓋は以下の状態になっているはずです。
ケーブル接続
イーサネット延長ケーブルおよび 電源延長ケーブル(スナップコネクタ付き)は、Surveyor ケーブルを BlueBoat の船尾から配線し、右舷ハッチ蓋をボートから素早く取り外せる状態を維持したい場合にのみ必要です。
クイックディスコネクト機能が不要な場合は、延長ケーブルを使用せず、Surveyor ケーブルを電子機器へ直接接続することができます。
また、Surveyor ケーブルをハッチ蓋を通して配線する場合も、延長ケーブルは不要です。
- 延長ケーブルを使用する場合:「延長ケーブルの使用」の手順に従ってください。
- 直接接続する場合:「直接ケーブル接続」の手順に従ってください。
延長ケーブルの使用
必要なもの
- 1 × Blue Robotics イーサネットスイッチ(未設置の場合)
- 1 × 600 mm JST GH – JST GH イーサネット延長ケーブル
- 1 × 400 mm 電源延長ケーブル
- 1 × 5A ミニブレードヒューズ
- 2 × インラインスナップコネクタ
- 小型マイナスドライバー(先端幅 約 2 mm)
- ケーブル管理用結束バンド(※本キットには付属しません)
延長ケーブルの使用手順
-
- 親指ナットを緩め、右舷ハッチ蓋アセンブリのカバーを取り外します。
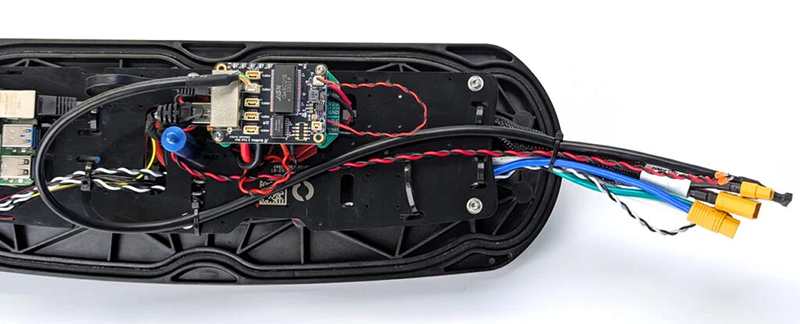
- Blue Robotics イーサネットスイッチがすでに BlueBoat に取り付けられている場合は、下部にあるヒューズボードへアクセスできるよう、一時的にヒューズボードから取り外します。
この際、配線を取り外す必要はありません。固定ネジを外すだけで十分です。
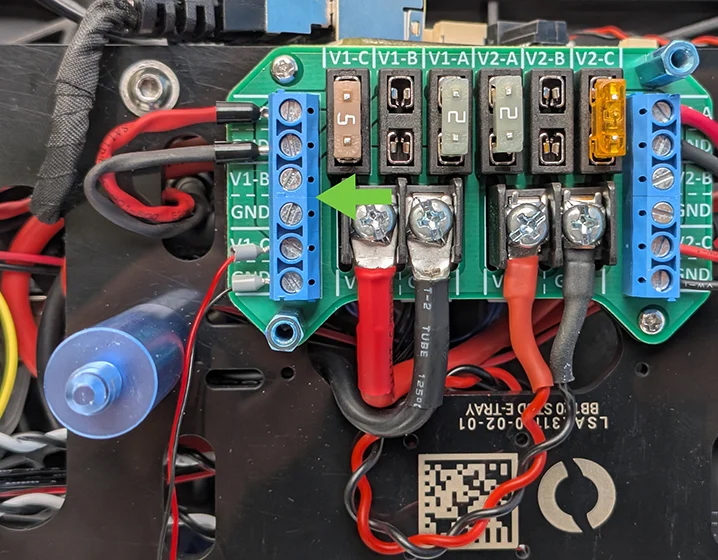
- 電源延長ケーブルを、ヒューズボードの V1 側にある空き出力端子に接続します。※V2 側は 5 V 電源専用のため、使用しないでください。
- 黒線:「GND」と表示された端子に接続
- 赤線:隣の電圧出力端子に接続
端子の緩め・締めには、小型マイナスドライバーを使用してください。
付属の 5 A ミニブレードヒューズを、ヒューズボード上部の対応するスロットに挿入します。
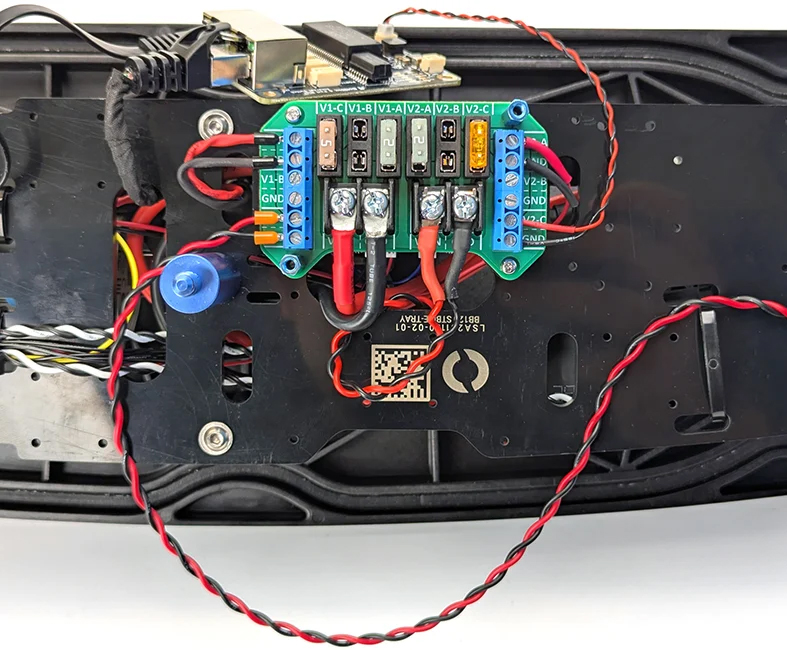 例として、ケーブルを V1-C 端子に接続した場合は、ヒューズも対応する V1-C スロットに取り付けます。
例として、ケーブルを V1-C 端子に接続した場合は、ヒューズも対応する V1-C スロットに取り付けます。 - Blue Robotics イーサネットスイッチをまだ設置していない場合は、このタイミングでインストールを行ってください。付属のインストールガイドに従って設定を完了した後、本ガイドに戻ります。
すでにスイッチを設置済みの場合は、この時点でヒューズボードを元の位置に再取り付けしてください。
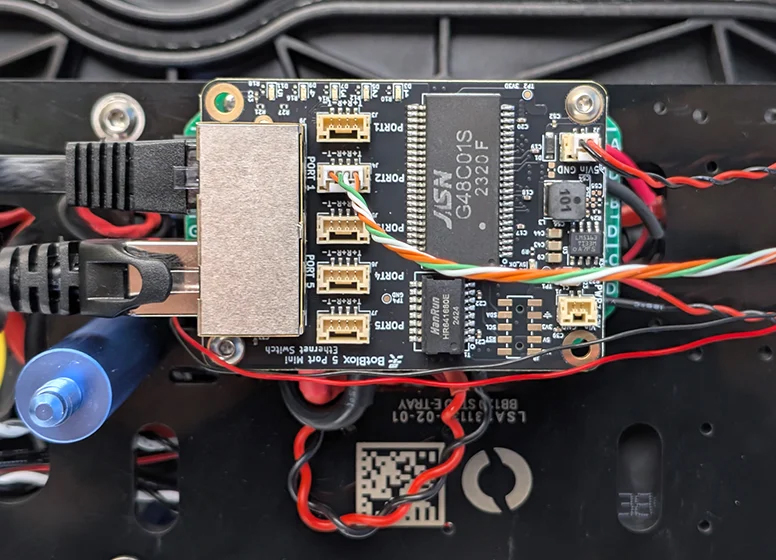
- イーサネット延長ケーブルを、スイッチの ポート 2、3、または 4 に接続します。
※ポート 1 および 5 は既に使用中のため、使用しないでください。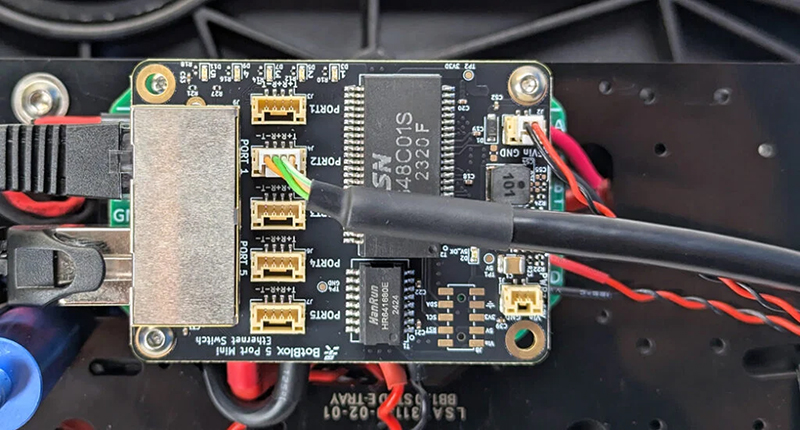
- 結束バンドを使用して、延長ケーブルを電子機器トレイおよびメインケーブル束に固定します。他のケーブルとほぼ同じ長さになるよう配置し、配線全体を整理してください。
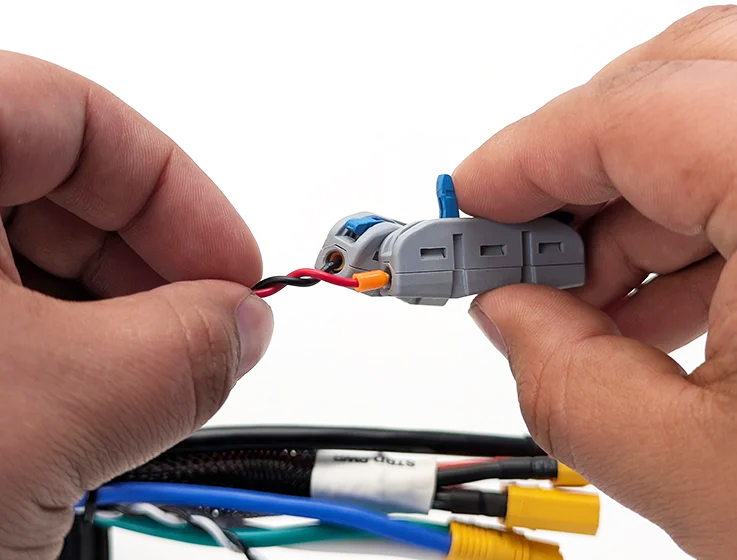
- 各電源線にスナップコネクタを取り付けます。
レバーを引き上げ、電線を穴に奥まで差し込み、レバーを閉じて固定します。
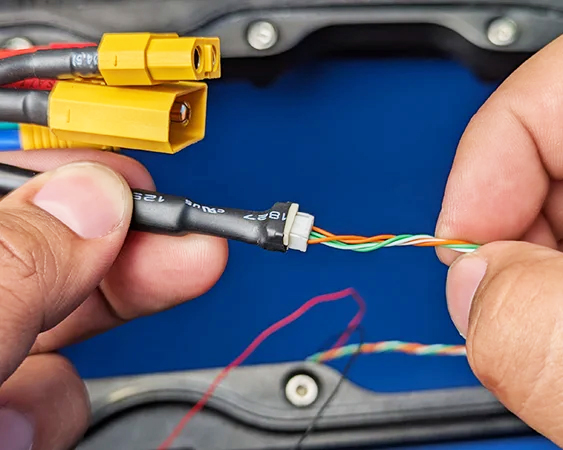
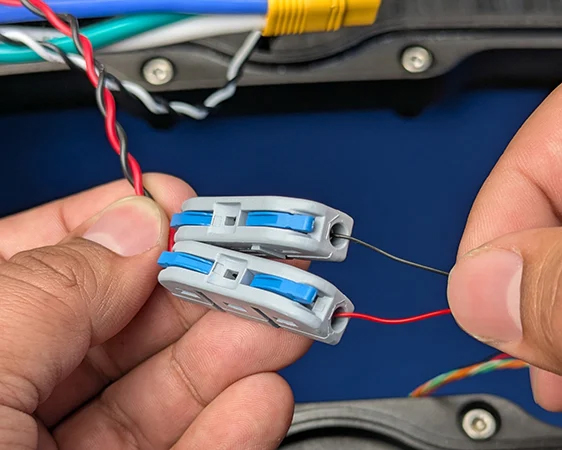
- Surveyor ケーブルを延長ケーブルに接続します。
JST GH コネクタ:イーサネット延長ケーブルに接続
電源線:スナップコネクタに接続配線の色が一致していることを必ず確認してください。
最後に ハッチ蓋カバーを再取り付けし、ハッチ蓋から BlueBoat 本体への残りのケーブルを再接続します。
- 親指ナットを緩め、右舷ハッチ蓋アセンブリのカバーを取り外します。
直接ケーブル接続
本セクションでは、延長ケーブルを使用せず Surveyor ケーブルを電子機器へ直接接続する方法を説明します。
必要なもの
- 1 × Blue Robotics イーサネットスイッチ(未設置の場合)
- 1 × 5A ミニブレードヒューズ
- 小型マイナスドライバー(先端幅 約 2 mm)
- ケーブル管理用結束バンド
手順
- Blue Robotics イーサネットスイッチがすでに BlueBoat に設置されている場合は、
下部のヒューズボードへアクセスできるよう、一時的にヒューズボードから取り外します。
配線を外す必要はありません。固定ネジを外すだけで十分です。
- Surveyor の電源線を、ヒューズボードの V1 側にある空き出力端子に接続します。※V2 側は 5 V 電源専用のため、使用しないでください。
- 黒線:「GND」と表示された端子に接続
- 赤線:隣の電圧出力端子に接続
端子の緩め・締めには、小型マイナスドライバーを使用してください。
例として、ケーブルを V1-C 端子に接続した場合は、ヒューズも対応する V1-C スロットに取り付けます。
- Blue Robotics イーサネットスイッチをまだ設置していない場合は、このタイミングでインストールを行ってください。設置ガイドに従って設定を完了した後、本ガイドに戻ります。
すでにスイッチを設置済みの場合は、この時点でヒューズボードを元の位置に再取り付けしてください。
- Surveyor ケーブルの イーサネット(JST GH)コネクタを、スイッチの ポート 2、3、または 4 に接続します。
※ポート 1 および 5 は既に使用中のため、使用しないでください。
- 結束バンドを使用して、ケーブルを電子機器トレイに固定し、配線全体を整理します。最後に、ハッチ蓋カバーを再取り付けし、ハッチ蓋から BlueBoat 本体への残りのケーブルを再接続してください。
SonarViewのインストールおよびSurveyorのキャリブレーション
手順
- BlueBoatの右舷ハッチ蓋を元に戻し、まだ接続していないケーブルがある場合は、すべて接続します。
- バッテリーを接続し、BlueBoat と BaseStation の電源を入れます。
その後、システムをコンピューターに接続します。
接続方法が不明な場合は、BlueBoat ソフトウェア設定ガイドを参照してください。 - ウェブブラウザのアドレスバーに 192.168.2.2 または blueos.local を入力し、BlueOS(BlueBoat のオペレーティングシステム)にアクセスします。
- BlueBoat を Wi-Fi ネットワークに接続します。
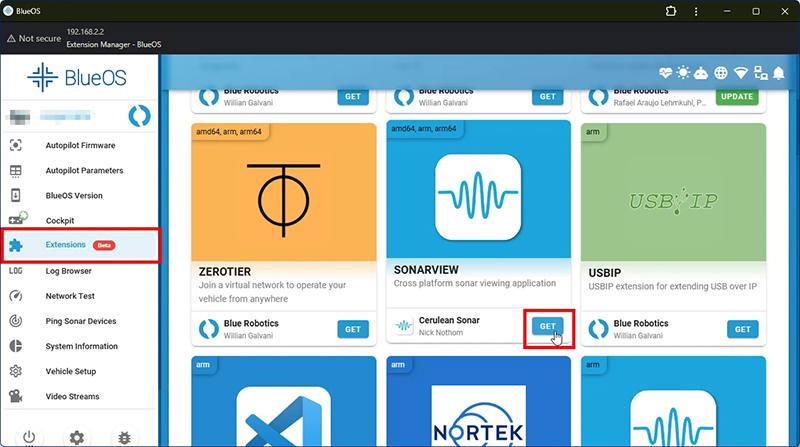
- 拡張機能のインストールには BlueOS バージョン 1.1.0 以降が必要です。
システムが古い場合は、BlueOS を更新してから本ガイドに戻ってください。 - BlueOS の 「拡張機能」 メニューに移動し、Cerulean Sonar 社の「SonarView」拡張機能をインストールします。
ココがポイント
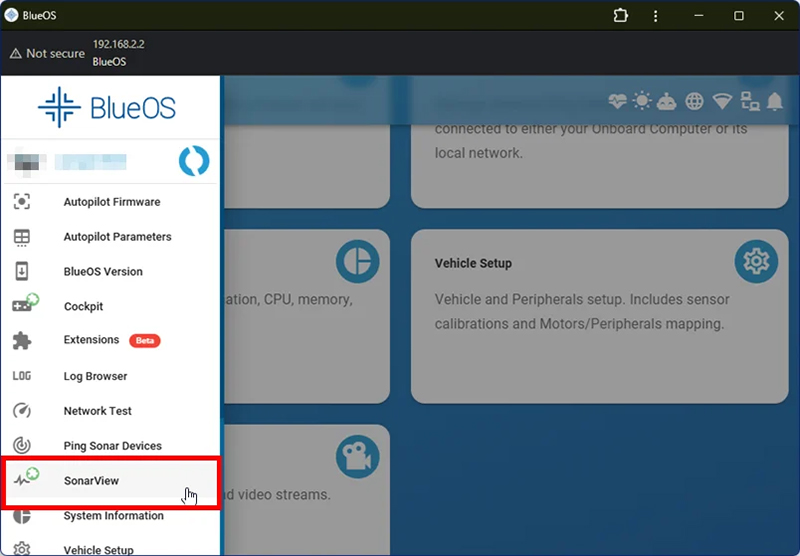
SonarView は、水上コンピューター用のスタンドアロンアプリケーションとしても利用できますが、BlueBoat で使用する場合は BlueOS 拡張機能としての利用を推奨します。これにより、BaseStation との接続が一時的に中断された場合でも、すべてのデータが BlueBoat 本体に直接記録されます。 - 拡張機能のインストールが完了すると、SonarView が左側のサイドバーに表示されます。クリックして SonarView を起動します。
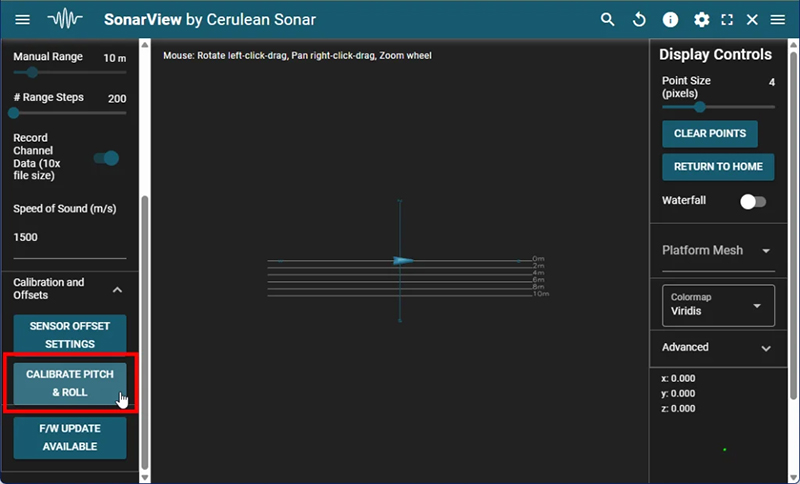
- 「デバイス検出」をクリックします。
正しく接続されていれば、Surveyor が一覧に表示されます。「接続」をクリックし、ファームウェア更新が利用可能な場合は、更新を実行してください。 - 左側の 「詳細設定」 メニューを展開し「キャリブレーションとオフセット」を開きます。Surveyor を水平な面に置いた状態で「ピッチ&ロールのキャリブレーション」をクリックし、画面の指示に従ってキャリブレーションを完了してください。
キャリブレーションが完了したら、Surveyor を BlueBoat に取り付けて設置作業を完了できます。
Surveyor の取り付け
Surveyor を取り付けるには、以下のものが必要です。
必要な部品・工具
- 1 × Surveyor 240-16 取付ブラケット
- 2 × BlueBoat 船体取付用ブッシング
- 2 × M6 × 20 ソケットヘッドキャップスクリュー
- 2 × M6 ナイロンインサートロックナット
- 4 × M5 × 18 ソケットヘッドキャップスクリュー
- 4 mm 六角レンチ
- 5 mm 六角レンチ
取付手順
- 「BlueBoat マウントハードウェア」と表示された袋に入っている部品と5mm六角レンチを使用して、取付ブラケットを右舷側船体に取り付けます。
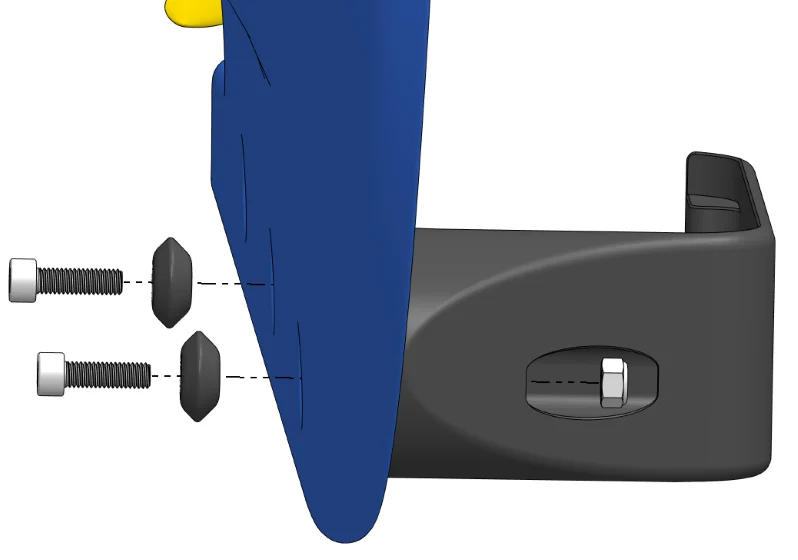
- ブラケットを取り付けた状態で、M5 × 18ソケットヘッドキャップスクリュー 4 本と4mm 六角レンチを使用し、Surveyor 本体をブラケットに固定します。
補足説明
- 上の図では ネジ位置を分かりやすく示すため、BlueBoat および Surveyor を逆さまにした状態で表示しています。実際の取り付け時には、船体前方側の 2 つの取付ポイントを使用してください。
- ナットの取り付けが難しい場合は、ボートを軽く傾けて重力を利用すると作業が容易になります。これによりナットがナットポケットに自然に収まり、ボルトのねじ山に正しく噛み合います。
ソフトウェア設定
この時点で SonarView 拡張機能はすでにインストールされているはずです。
インストールされていない場合は「SonarView のインストール」セクションの手順に従ってください。
メッセージストリーム速度の調整
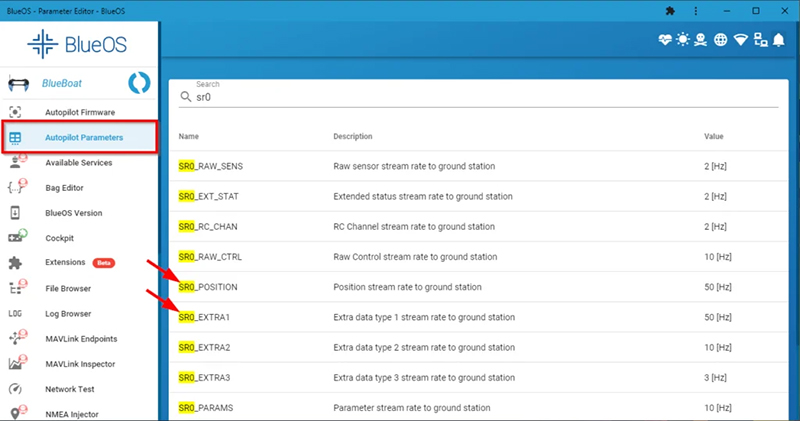
- BlueOS で「オートパイロットパラメータ」をクリックします。
検索ボックスに「 sr0 」と入力し、SR0_POSITION および SR0_EXTRA1の両パラメータを探して、いずれも「50」に設定します。
QGroundControl の設定
車両側でメッセージレートを制御できるように、QGroundControl の設定を行います。
手順
- QGroundControl を起動し、左上の Q アイコンをクリックして「アプリケーション設定」を選択します。
- 左側メニューから MAVLinkを選択し「車両設定による全ストリーム制御」を有効にします。
設定後、QGroundControl を再起動してください。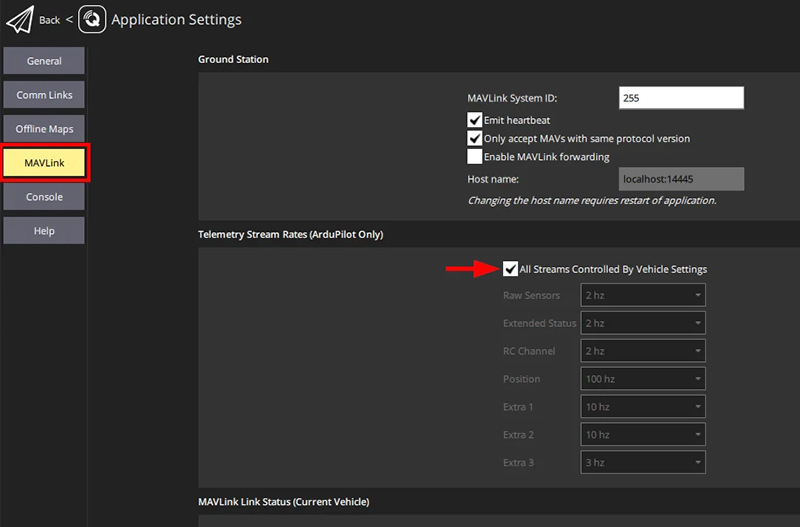
セッション構成の作成
- SonarViewのメインメニューから
「セッション設定(Session Settings)」 をクリックします。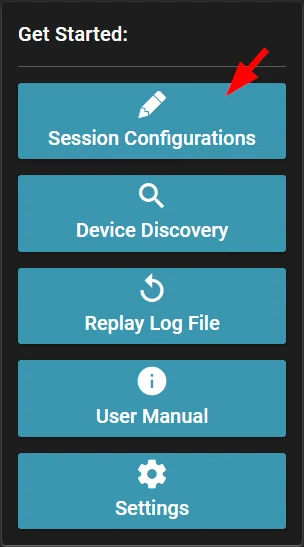
- セッション設定画面で 「ADD DEVICE」 をクリックします。
次のウィンドウで 「デバイスの検出(Discover Devices)」 をクリックし、Surveyor を選択します。デバイスのニックネームを入力し、その他の設定はすべてデフォルトのままにして 「保存」 をクリックします。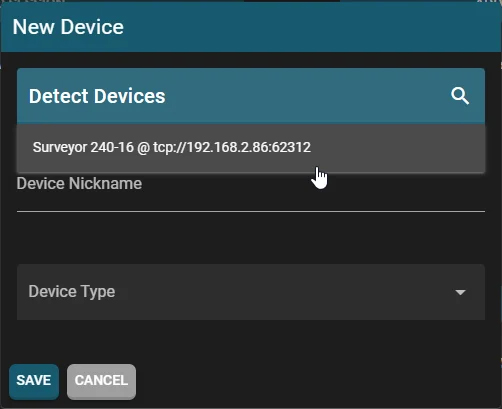
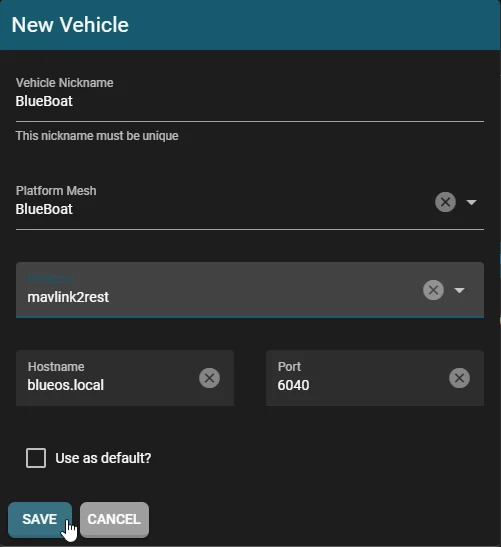
- セッション設定画面で 「ADD VEHICLE」 をクリックします。
次のウィンドウで、以下の設定を行ってください。- 車両のニックネームを入力
- プラットフォームメッシュ:
BlueBoatに設定 - プロトコル:
mavlink2restに設定
設定後、「保存」 をクリックします。
- 新しいセッションを作成するために 「セッションを追加(Add Session)」 をクリックします。
次の画面でセッション名を入力し、ドロップダウンメニューから BlueBoat とSurveyor をセッションに追加します。
完了したら 「保存」 をクリックしてください。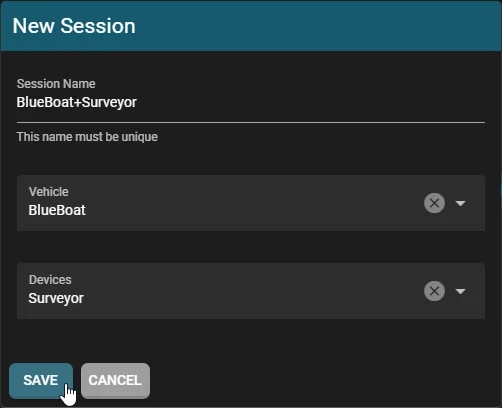
以上で完了です。作成したセッションは、今後 「デバイス検出(Device Discovery)」 メニューに表示されます。
セッション横の 「CONNECT」 をクリックし、続いて 「START」 をクリックするとSurveyorの使用を開始できます。
今後のステップ
Surveyor 240-16 の詳細な使用方法については、Cerulean 社の公式ドキュメントをご参照ください。以下に、役立つ情報へのリンクを示します。
フィードバック
私たちは常に 本ガイド、ソフトウェア、ユーザー体験のさらなる改善に取り組んでいます。
ガイドの内容に関するご意見・ご要望がありましたら、ぜひお気軽にフィードバックをお寄せください。






{kind=link}